Institute Overview:
Osaka University: Komatsu “MIRAI” (Japanese for “Future”) Construction Equipment Cooperative Research Center
Koichi Osuka*,** and Youjirou Ohbatake**
*Department of Mechanical Engineering, Graduate School of Engineering, Osaka University
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan
**Komatsu MIRAI Construction Equipment Cooperative Research Center, Osaka University
Central Terrace 504, 2-1 Yamadaoka, Suita, Osaka 565-0871, Japan

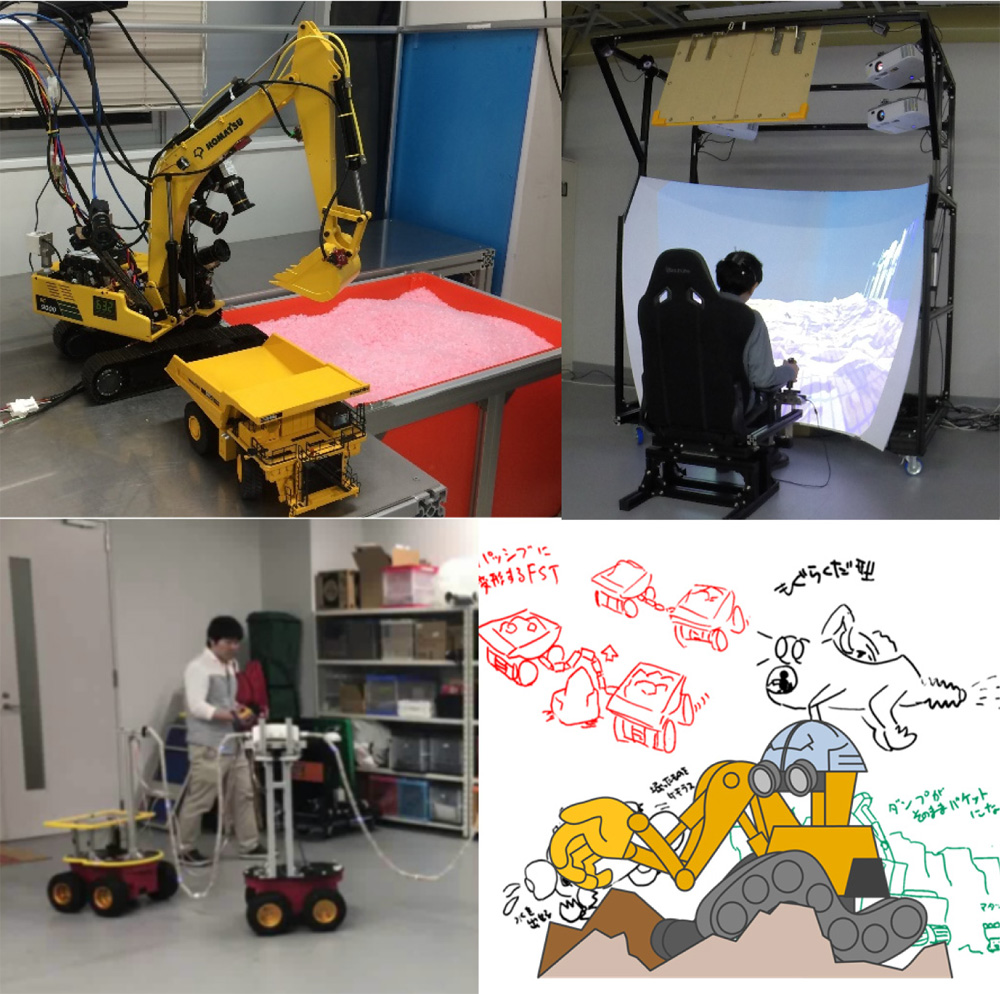
Osaka University and Komatsu Ltd. started a joint research project in 2006 as an industry-academia collaboration activity, and Komatsu established a cooperative research center on Osaka University campus in 2015. The center has conducted joint research to solve the problems of companies as well as independent research on remote and autonomous construction machinery. Since 2017, it has been working on “HENNA” construction equipment (“HENNA” in Japanese means “novel and innovative with unconventional thinking”) as a new research idea that combines the academic nature of Osaka University with the corporate nature of Komatsu. These research initiatives and the concept of the Cooperative Research Center (2017–present) are presented here.
Komatsu MIRAI CE Cooperative Research Center
- [1] Osaka University News Letter, Vol.70, pp. 5-6, 2015.
- [2] Osaka University News Letter, Vol.76, pp. 3-5, 2017.
- [3] K. Osuka, “Where does intelligence come from? – Hidden brain to explore with centipede robot,” Modern Science Company, 2018.
- [4] M. Mori, “Recommendation of ‘non-serious’,” Kodansha, 1984.
- [5] K. Nish, “Philosophical Thinking-The Heart of Husserl Phenomenology,” Chikuma Gakugei Bunko, 2005.
- [6] O. Mori, “Proposal of FST: Flexible Sensor Tube and operation of four-legged robot CUL using FST,” Robotics and Mechatronics Workshop ’00, 1A1-06-013, 2000.
- [7] F. Takamura, Y. Ohta, M. Ozaki, and I. Nishizawa, “Technology circulation model of industry-academia collaboration utilizing visualization technology of universities and its practice,” Proc. of the Japan Society of Mechanical Engineers, Vol.82, No.842, 2016.
- [8] K. Osuka, “Osaka University-Komatsu “MIRAI” Construction Equipment Cooperative Research Center,” Overseas Investment and Financing, July Issue, pp. 54-57, 2019.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.