Paper:
Development of a Fish-Like Robot with a Continuous and High Frequency Snap-Through Buckling Mechanism Using a Triangular Cam
Daisuke Nakanishi*, Shoya Kobayashi*, Kiichi Obara*, Shotaro Matsumura*, and Yuichiro Sueoka**
*Department of Control Engineering, National Institute of Technology, Matsue College
14-4 Nishi-ikuma, Matsue, Shimane 690-8518, Japan
**Department of Mechanical Engineering, Graduate School of Engineering, Osaka University
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan

This study focuses on the high maneuverability of fish in water to design a fish-like robot via snap-through buckling. The aim of this study is to improve swimming speed by increasing the frequency at which snap-through buckling occurs. Here, we propose a novel drive mechanism using a triangular cam that can continuously generate snap-through buckling at a high frequency. In addition, we developed a fish-like robot via the proposed mechanism and analyzed the influence of the frequency of snap-through buckling on swimming speed. The results obtained indicate that swimming speed is improved and that the relationship between frequency and swimming speed exhibits a single peak. In other words, the swimming speed is reduced when the frequency is significantly increased. We also determined that swimming speed was improved using a wide elastic thin plate as the driving mechanism.
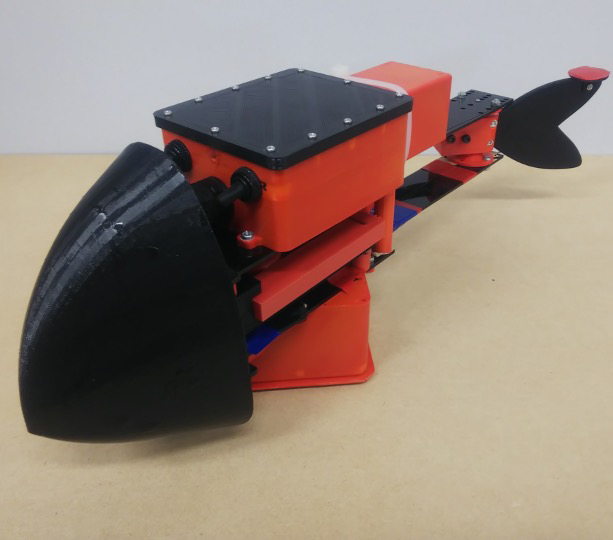
Fish-like robot with snap-through buckling
- [1] Y. Takada, K. Koyama, and T. Usami, “Robotic Fish,” J. Robot. Mechatron., Vol.26, No.3, pp. 391-393, 2014.
- [2] K. Hirata, “Propulsion performance of an experimental fish robot,” Proc. on Spring Conf. of Japan Society for Design Engineering 2000, pp. 163-166, 2000 (in Japanese).
- [3] Y. Takada, T. Nakamura, K. Koyama, and T. Wakisaka, “Self-position Estimation of Small Fish Robot Based on Visual Information from Camera,” J. of the JIME, Vol.47, No.3, pp. 138-144, 2012.
- [4] C. Rossi, J. Colorado, W. Coral, and A. Barrientos, “Bending continuous structures with SMAs: a novel robotic fish design,” Bioinspiration & biomimetics, Vol.6, No.4, 045005, 2011.
- [5] R. K. Katzschmann, J. DelPreto, R. MacCurdy, and D. Rus, “Exploration of underwater life with an acoustically controlled soft robotic fish,” Science Robotics, Vol.3, No.16, eaar3449, 2018.
- [6] Y. Kobayashi, Y. Matsumura, H. Mochiyama, and N. Takesue, “Influence of Shapes and Excitation Force to Moving Performance of Miniature Aquatic Robot Utilizing Resonance of Elastic Plate,” Proc. of SI2019, 3B1-12, 2018.
- [7] T. Taniguchi, T. Nishimura, M. Hammadi, Jean-Yves Choley, A. Ming, and M. Shimojo, “Development of Biomimetic Soft Underwater Robot – Development of Soft Underwater Robot with Built-in Driving System –,” J. of The Society of Instrument and Control Engineers, Vol.55, No.4, pp. 252-259, 2019.
- [8] H. Mochiyama, A. Yamada, and H. Fujimoto, “Impulse Force Generator based on Closed Elastica,” J. of the Robotics Society of Japan, Vol.29, No.6, pp. 492-495, 2011.
- [9] T. Tsuda, H. Mochiyama, and H. Fujimoto, “Quick stair-climbing using snap-through buckling of closed elastica,” 2012 Int. Symp. on Micro-NanoMechatronics and Human Science, pp. 368-373, 2012.
- [10] T. Tsuda, H. Mochiyama, and H. Fujimoto, “Robotic Jerboa: A Compact Bipedal Kick-and-Slide Robot powered by Unidirectional Impulse Force Generators,” 2010 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2523-2524, 2010.
- [11] A. Yamada, H. Mameda, H. Mochiyama, and H. Fujimoto, “A Compact Jumping Robot utilizing Snap-through Buckling with Bend and Twist,” 2010 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 389-394, 2010.
- [12] A. Yamada, Y. Sugimoto, H. Mameda, and H. Fujimoto, “An Impulsive Force Generator Based on Closed Elastica with Bending and Twisting and Its Application to Quick Turning Motion of Swimming Robot,” J. of the Robotics Society of Japan, Vol.29, No.10, pp. 57-67, 2011.
- [13] A. Yamada, M. Watari, H. Mochiyama, and H. Fujimoto, “A Robotic Catapult based on the Closed Elastica with a High Stiffness Endpoint and Its Application to Swimming Tasks,” J. of the Robotics Society of Japan, Vol.27, No.10, pp. 1144-1153, 2009.
- [14] F. Nose, Y. Sueoka, D. Nakanishi, and K. Osuka, “Development of a fish-like swimming robot with snap-through buckling mechanism: usac-I and swimming experiment of it,” Proc. of the 2018 JSME Conf. on Robotics and Mechatronics, 2P2-D09, 2018.
- [15] Y. Sueoka, F. Nose, D. Nakanishi, Y. Sugimoto, and K. Osuka, “Design of anisotropic impulse motion based on snap-through buckling for fish-like swimming robot,” 2018 Int. Symp. on Nonlinear Theory and Its Applications, pp. 328-331, 2018.
- [16] K. Obara, F. Nose, Y. Sueoka, and D. Nakanishi, “Study of swimming mechanism of a fish type robot using snap-through buckling mechanism – Proposal of swimming mechanism using triangular cam –,” Proc. of SI2018, 1A4-12, 2018.
- [17] K. Hanahara, F. Nose, Y. Sueoka, D. Nakanishi, and K. Osuka, “Proposal of Wire-driven Snap-through Buckling for a Fin-type Swimming Robot,” Proc. of SCI’19, TS01-2-1, 2019.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.