Development Report:
Study of Neural-Kinematics Architectures for Model-Less Calibration of Industrial Robots
Monica Tiboni, Giovanni Legnani, and Nicola Pellegrini
Università degli Studi di Brescia
via Branze 38, Brescia 25123, Italy

Modeless industrial robot calibration plays an important role in the increasing employment of robots in industry. This approach allows to develop a procedure able to compensate the pose errors without complex parametric model. The paper presents a study aimed at comparing neural-kinematic (N-K) architectures for a modeless non-parametric robotic calibration. A multilayer perceptron feed-forward neural network, trained in a supervised manner with the back-propagation learning technique, is coupled in different modes with the ideal kinematic model of the robot. A comparative performance analysis of different neural-kinematic architectures was executed on a two degrees of freedom SCARA manipulator, for direct and inverse kinematics. Afterward the optimal schemes have been identified and further tested on a three degrees of freedom full SCARA robot and on a Stewart platform. The analysis on simulated data shows that the accuracy of the robot pose can be improved by an order of magnitude after compensation.
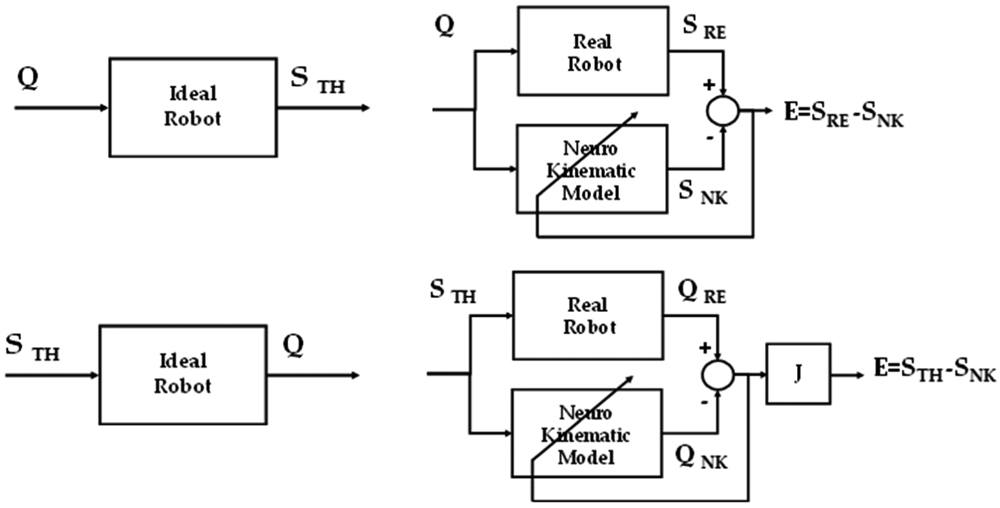
Forward and inverse neural-kinematic calibration schemes
- [1] B. W. Mooring, Z. S. Roth, and M. R. Driels, “Fundamentals of manipulator calibration,” John Wiley & Sons, 1991.
- [2] R. Bernhardt and S. Albright, “Robot Calibration,” Springer, pp. 37-45, 1993.
- [3] J. M. Hollerbach, “A Survey of Kinematic Calibration,” O. Khatib, J. J. Craig, and T. Lozanol Perez (Eds.), “The robotics review 1,” MIT Press, pp. 207-242, 1989.
- [4] B. Karan and M. Vukobratoviae, “Calibration and Accuracy of Manipulation Robot Models – An Overview,” Mechanism and Machine Theory, Vol.29, No.3, pp. 479-500, 1994.
- [5] A. Y. Elatta, L. P. Gen, F. L. Zhi, Y. Daoyuan, and L. Fei, “An overview of robot calibration,” Information Technology J., Vol.3, No.1, pp. 74-78, 2004.
- [6] D. S. Wang and J. N. Chi, “Survey on Robot Kinematics Calibration,” Application Research of Computers, Vol.24, No.9, pp. 8-11, 2007.
- [7] F. Aggogeri, A. Borboni, A. Merlo, N. Pellegrini, and M. Tiboni, “Design of a 3-DOFs Parallel Robotic Device for Miniaturized Object Machining,” N. Aspragathos, P. Koustoumpardis, and V. Moulianitis (Eds.), “Advances in Service and Industrial Robotics,” RAAD 2018, Mechanisms and Machine Science, Vol.67, Springer, 2019.
- [8] S. Aoyagi, M. Suzuki, T. Takahashi, J. Fujioka, and Y. Kamiya, “Calibration of Kinematic Parameters of Robot Arm Using Laser Tracking System: Compensation for Non-Geometric Errors by Neural Networks and Selection of Optimal Measuring Points by Genetic Algorithm,” Int. J. Automation Technol., Vol.6, No.1, pp. 29-37, 2012.
- [9] Q. Zhu and Y. Yin, “Research Status of Robot Calibration Technology,” 5th Int. Conf. on Information, Cybernetics, and Computational Social Systems (ICCSS), pp. 424-428, 2018.
- [10] K. Bahassou, A. Salih, A. Jalid, and M. Oubrek, “Modeling of the correction matrix for the calibration of measuring machines,” Int. J. of Mechanical Engineering and Technology, Vol.8, Issue 10, pp. 862-870, 2017.
- [11] K. Schroer, S. L. Albright, and M. Grethlein, “Complete, Minimal and Model Continuous Kinematic Models for Robot Calibration,” Robotics and Computer Integrated Manufacturing, Vol.13, No.1, pp. 73-85, 1997.
- [12] A. Omodei, G. Legnani, R. Adamini, and M. Tiboni, “Three methodologies for the calibration of industrial manipulators: experimental results on a SCARA robot,” J. of Robotic Systems, Vol.12, No.17, pp. 291-307, 2000.
- [13] X. L. Zhong and J. M. Lewis, “A new methods for autonomous Robot Calibration,” Proc. of 1995 IEEE Int. Conf. on Robotics and Automation, Vol.2, pp. 1790-1795, 1995.
- [14] L. Giovanni and T. Monica, “Optimal design and application of a low-cost wire-sensor system for the kinematic calibration of industrial manipulators,” Mechanism and Machine Theory, Vol.73, pp. 25-48, 2014.
- [15] G. Alici and B. Shirinzadeh, “A systematic technique to estimate positioning errors for robot accuracy improvement using laser interferometry based sensing,” Mechanism and Machine Theory, Vol.40, Issue 8, pp. 879-906, 2005.
- [16] B. Ying, “On the comparison of model-based and modeless robotic calibration based on a fuzzy interpolation method,” The Int. J. of Advanced Manufacturing Technology, Vol.31, pp. 1243-1250, 2007.
- [17] Y. Bai and H. Zhuang, “Modeless Robots Calibration in 3D Workspace with On-Line Fuzzy Interpolation Technique,” Proc. of IEEE Int. Conf. on Systems, Man and Cybernetics, Vol.6, pp. 5233-5239, 2004.
- [18] D. Wang, Y. Bai, and J. Zhao, “Robot Manipulator Calibration using Neural Network and a Camera-based Measurement System,” Trans. of the Institute of Measurement and Control, Vol.34, No.1, pp. 105-121, 2012.
- [19] Y. Liu, H. Liu, F. L. Ni, and W. F. Xu, “New Self-Calibration Approach to Space Robots based on Hand-Eye Vision,” J. of Central South University of Technology, Vol.18, No.4, pp. 1087-1096, 2011.
- [20] Y. Meng, and H. Q. Zhuang, “Autonomous Robot Calibration using Vision Technology,” Robotics and Computer-Integrated Manufacturing, Vol.23, No.4, pp. 436-446, 2007.
- [21] J. H. Jang, S. H. Kim, and Y. K. Kwak, “Calibration of geometric and non-geometric errors of an industrial robot,” Robotica, Vol.19, Issue 3, pp. 311-321, 2001.
- [22] Q. Daokui, W. Jintao, X. Dianguo, and L. Zhenyu, “Hybrid Calibration of a Five-axis Robot based on Modeless and Model-based Methods,” Proc. of Second Information and Control, pp. 612-622, 2007.
- [23] H. N. Nguyen, P. N. Le, and H. J. Kang, “A new calibration method for enhancing robot position accuracy by combining a robot model-based identification approach and an artificial neural network-based error compensation technique,” Advances in Mechanical Engineering, Vol.11, Issue 1, pp. 1-11, 2019.
- [24] A. T. C. Goh, “Back-propagation neural network for modelling complex systems,” Artificial Intelligence in Engineering, Vol.9, Issue 3, pp. 143-151, 1995.
- [25] M. Tiboni, G. Incerti, C. Remino, and M. Lancini, “Comparison of Signal Processing Techniques for Condition Monitoring Based on Artificial Neural Networks,” A. F. Del Rincon, R. F. Viadero, F. Chaari, R. Zimroz, and M. Haddar (Eds.), “Advances in Condition Monitoring of Machinery in Non-Stationary Operations,” CMMNO 2018, Applied Condition Monitoring, Vol.15, pp. 179-188, Springer, 2019.
- [26] K. Nouri, R. Dhaouadi, and N. Braiek, “A New Adaptive Control Scheme Using Dynamic Neural Networks,” J. Robot. Mechatron., Vol.20, No.1, pp. 171-177, 2008.
- [27] Y. Yamazaki, “Development and Applications of the SCARA Robot,” J. Robot. Mechatron., Vol.26, No.2, pp. 127-133, 2014.
- [28] K. Koiwai, Y. Liao, T. Yamamoto, T. Nanjo, Y. Yamazaki, and Y. Fujimoto, “Feature Extraction for Excavator Operation Skill Using CMAC,” J. Robot. Mechatron., Vol.28, No.5, pp. 715-721, 2016.
- [29] K. Yamafuji, “Development of SCARA Robots,” J. Robot. Mechatron., Vol.31, No.1, pp. 10-15, 2019.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.