Development Report:
Development of Testbed AUV for Formation Control and its Fundamental Experiment in Actual Sea Model Basin
Akihiro Okamoto, Motonobu Imasato, Shunka C. Hirao, Hidenori Sekiguchi, Takahiro Seta, Masahiko Sasano, and Toshifumi Fujiwara
Offshore Advanced Technology Department, National Maritime Research Institute, National Institute of Maritime, Port, and Aviation Technology
6-38-1 Shinkawa, Mitaka, Tokyo 181-0004, Japan

The formation control of multiple autonomous underwater vehicles (AUVs) is increasingly becoming a vital factor in enhancing the efficiency of ocean resources exploration. However, it is currently difficult to deploy such a package of AUVs for operation at sea because of their large size. The aim of our study is to create a demonstration system for formation control algorithms using actual hardware. To implement a prototype system, we developed a testbed AUV usable in a test basin and performed a simple formation control test in the Actual Sea Model Basin of the National Maritime Research Institute, Japan. Two AUVs, the simulated “virtual” leader and the developed “real” follower, communicate through an acoustic link and hence cruise to maintain a constant distance between them. Tests for more sophisticated formation control algorithms will be enabled using the system; consequently rapid implementation at sea will be realized.
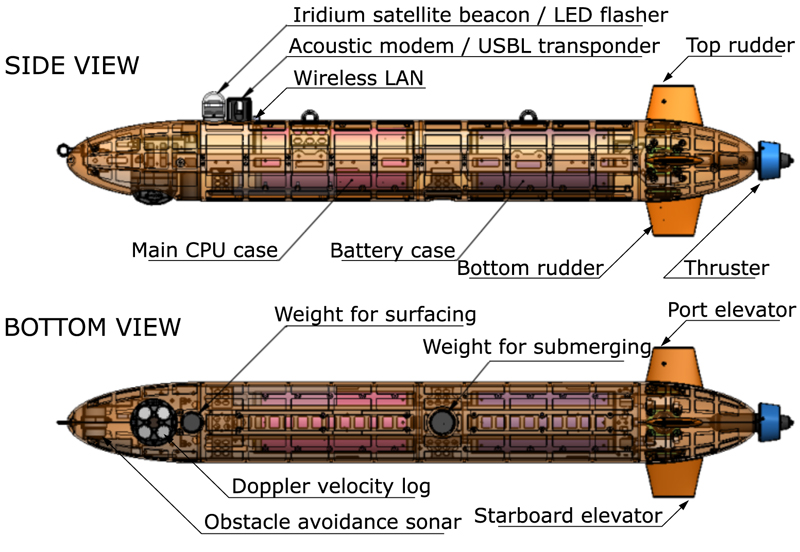
Onboard equipment of testbed mini-AUV
- [1] K. Kim and T. Ura, “A Cruising AUV r2D4: Intelligent Multirole Platform for Deep-Sea Survey,” J. Robot. Mechatron., Vol.26, No.2, pp. 262-263, 2014.
- [2] Y. Nishida, T. Ura, T. Nakatani, T. Sakamaki, J. Kojima, Y. Itoh, and K. Kim, “Autonomous Underwater Vehicle “Tuna-Sand” for Image Observation of the Seafloor at a Low Altitude,” J. Robot. Mechatron., Vol.26, No.4, pp. 519-521, 2014.
- [3] Y. Nishida, K. Nagahashi, T. Sato, A. Bodenmann, B. Thornton, A. Asada, and T. Ura, “Autonomous Underwater Vehicle “BOSS-A” for Acoustic and Visual Survey of Manganese Crusts,” J. Robot. Mechatron., Vol.28, No.1, pp. 91-94, 2016.
- [4] T. Maki, Y. Noguchi, Y. Kuranaga, K. Masuda, T. Sakamaki, M. Humblet, and Y. Furushima, “Low-Altitude and High-Speed Terrain Tracking Method for Lightweight AUVs,” J. Robot. Mechatron., Vol.30, No.6, pp. 971-979, 2018.
- [5] A. Okamoto, T. Seta, M. Sasano, S. Inoue, and T. Ura, “Visual and Autonomous Survey of Hydrothermal Vents Using a Hovering-Type AUV: Launching Hobalin Into the Western Offshore of Kumejima Island,” Geochemistry, Geophysics, Geosystems, Vol.20, No.12, pp. 6234-6243, 2019.
- [6] Y. Nishida, T. Sonoda, S. Yasukawa, K. Nagano, M. Minami, K. Ishii, and T. Ura, “Underwater Platform for Intelligent Robotics and its Application in Two Visual Tracking System,” J. Robot. Mechatron., Vol.30, No.2, pp. 238-247, 2018.
- [7] T. Sato, K. Kim, S. Inaba, T. Matsuda, S. Takashima, A. Oono, D. Takahashi, K. Oota, and N. Takatsuki, “Exploring Hydrothermal Deposits with Multiple Autonomous Underwater Vehicles,” Proc. of the 2019 IEEE Underwater Technology (UT), Kaohsiung, Taiwan, pp. 1-5, 2019.
- [8] A. P. Aguiar and J. P. Hespanha, “Trajectory-Tracking and Path-Following of Underactuated Autonomous Vehicles with Parametric Modeling Uncertainty,” Proc. of the IEEE Trans. Automatic Control, Vol.52, No.8, pp. 1362-1379, 2007.
- [9] P. Millán, L. Orihuela, I. Jurado, and F. R. Rubio, “Formation Control of Autonomous Underwater Vehicles Subject to Communication Delays,” IEEE Trans. on Control Systems Technology, Vol.22, No.2, pp. 770-777, 2014.
- [10] B. Das, B. Subudhi, and B. B. Pati, “Adaptive sliding mode formation control of multiple underwater robots,” Archives of Control Sciences, Vol.24, No.4, pp. 515-543, 2014.
- [11] P. Ghorbanian, S. G. Nersesov, and H. Ashrafiuon, “Obstacle avoidance in multi-vehicle coordinated motion via stabilization of time-varying sets,” Proc. of the 2011 American Control Conf., pp. 3381-3386, 2011.
- [12] X. Xiang, B. Jouvencel, and O. Parodi, “Coordinated Formation Control of Multiple Autonomous Underwater Vehicles for Pipeline Inspection,” Int. J. Advanced Robotic Systems, Vol.7, No.1, pp. 75-84, 2010.
- [13] S. Li, X. Wang, and L. Zhang, “Finite-Time Output Feedback Tracking Control for Autonomous Underwater Vehicles,” J. Oceanic Engineering, Vol.40, No.3, pp. 727-751, 2015.
- [14] P. L. Kempker, A. C. M. Ran, and J. H. van Schuppen, “A formation flying algorithm for autonomous underwater vehicles,” Proc. of the 2011 50th IEEE Conf. on Decision and Control and European Control Conf., Orlando, FL, pp. 1293-1298, 2011.
- [15] Z. Yan, D. Xu, T. Chen, W. Zhang, and Y. Liu, “Leader-Follower Formation Control of UUVs with Model Uncertainties, Current Disturbances, and Unstable Communication,” Sensors, Vol.18, No.2, 662, 2018.
- [16] J. A. Neasham, G. Goodfellow, and R. Sharphouse, “Development of the “Seatrac” miniature acoustic modem and USBL positioning units for subsea robotics and diver applications,” Proc. OCEANS 2015 – Genova, pp. 1-8, 2015.
- [17] T. Seta, A. Okamoto, S. Inaba, and M. Sasano, “Development of a new operating system software for a hovering-type autonomous underwater vehicle HOBALIN,” Proc. of the 2017 11th Asian Control Conf. (ASCC), Gold Coast, QLD, pp. 37-42, 2017.
- [18] K. Tanizawa, M. Ueno, H. Taguchi, and T. Fujiwara, “Actual Sea Model Basin in NMRI (National Maritime Research Institute),” Marine Engineering, Vol.48, No.6, pp. 776-781, 2013 (in Japanese).
- [19] M. Tsujimoto, M. Kuroda, K. Shiraishi, Y. Ichinose, and N. Sogihara, “Verification on the Resistance Test in Waves Using the Actual Sea Model Basin,” J. Japan Society of Naval Architects and Ocean Engineers, Vol.16, pp. 33-39, 2012.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.