Paper:
Numerical Investigation on Hydrodynamic Performance of a Ducted Propeller for Vectored Underwater Robot
Rongmin Zhang and Shasha Zhou
School of Mechanical and Automotive Engineering, Qilu University of Technology (Shandong Academy of Sciences)
3501 Daxue Road, Changqing District, Jinan City, Shandong 250353, China

This paper investigated hydrodynamic performance of the Ka4-70+No.19A ducted propeller astern of a vectored underwater robot at diverse deflection angles. Employing SST k-ω turbulence model combined with moving reference frame technique, numerical computation of the ducted propeller in a fully developed turbulence behind hull was carried out. The validity of the model was verified by comparing the numerical results of open water performance and the experimental values. The hydrodynamic performance of the ducted propeller was worked out and discussed in detail. The wake flow and thrust deduction fraction corresponding to different deflection angles were analyzed. Results show that the ducted propeller generates more thrust and requires more torque at lager deflection angle. In addition, the thrust deduction fraction increases with the increase of the deflection angle.
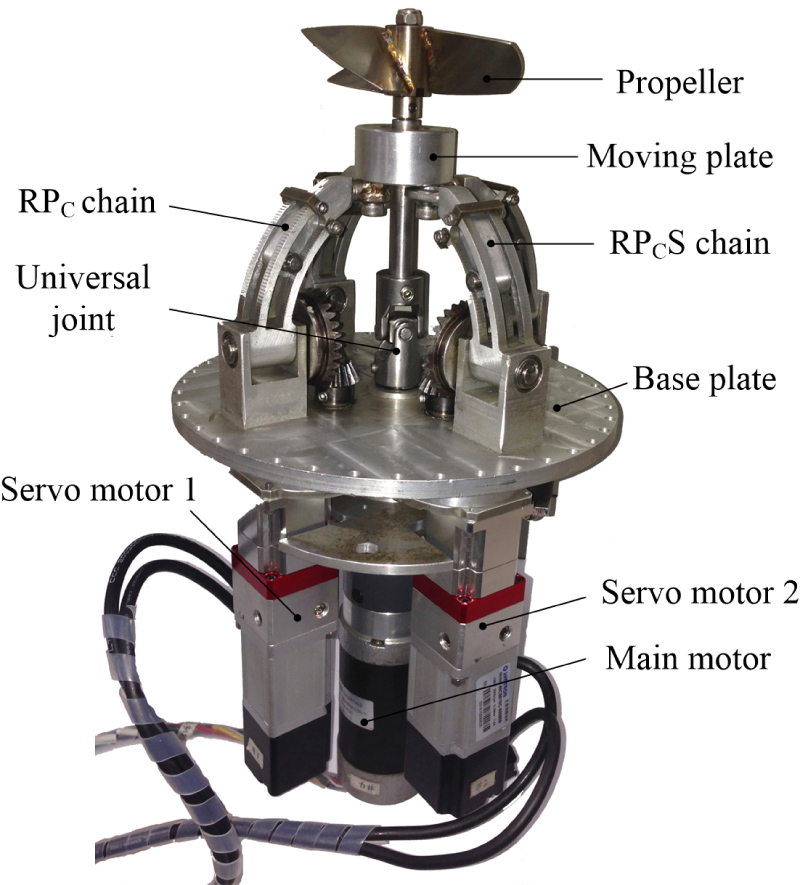
Vectored thruster for underwater robot
- [1] M. Takagi, H. Mori, A. Yimit, Y. Hagihara, and T. Miyoshi, “Development of a Small Size Underwater Robot for Observing Fisheries Resources – Underwater Robot for Assisting Abalone Fishing –,” J. Robot. Mechatron., Vol.28, No.3, pp. 397-403, 2016.
- [2] Y. Nagashima, N. Taguchi, T. Ishimatsu, and H. Inoue, “Development of a Compact Autonomous Underwater vehicle Using Varivec Propeller,” J. Robot. Mechatron., Vol.14, No.2, pp. 112-117, 2002.
- [3] Z. Qin and J. K. Rajeev, “Numerical Analysis on the Wake Dynamics of a Ducted Propeller,” Ocean Engineering, Vol.171, pp. 202-224, 2019.
- [4] G. Jie, G. Chunyu, Z. Dagang, W. Tiecheng, and S. Kewei, “A Comparative DES Study of Wake Vortex Evolution for Ducted and Non-ducted Propellers,” Ocean Engineering, Vol.160, pp. 78-93, 2018.
- [5] K. Seungnam, K. Spyros, and D. Weikang, “Panel Method for Ducted Propellers with Sharp Trailing Edge Duct with Fully Aligned Wake on Blade and Duct,” J. of Marine Science and Engineering, Vol.6, No.3, 2018.
- [6] S. Yilmaz, D. Erdem, and M. S. Kavsaoglu, “Performance of a Ducted Propeller Designed for UAV Applications at Zero Angle of Attack Flight: An Experimental Study,” Aerospace Science and Technology, Vol.45, pp. 376-386, 2015.
- [7] W. Zhanzhi, X. Ying, S. Haitao, and W. Rui, “Numerical Study on Hydrodynamic Performance of Podded Propulsor in Straight Forward and Steering Conditions,” J. of Propulsion Technology, Vol.37, No.2, pp. 593-600, 2016.
- [8] S. Savas, D. Ali, D. Cihad, and B. Sakir, “Investigation of Self-propulsion of DARPA Suboff by RANS Method,” Ocean Engineering, Vol.150, pp. 258-271, 2018.
- [9] R. Zhang, Y. Chen, and J. Gao, “Numerical Investigation on Transverse Maneuverability of a Vectored Underwater Vehicle without Appendage,” J. Robot. Mechatron., Vol.28, No.3, pp. 371-377, 2016.
- [10] A. N. Hayati, S. M. Hashemi, and M. Shams, “A Study on the Behind-Hull Performance of Marine Propellers Astern Autonomous Underwater Vehicles at Diverse Angles of Attack,” Ocean Engineering, Vol.59, pp. 152-163, 2013.
- [11] Z. Shaowei, Y. Jiancheng, and Z. Aiqun, “Spiraling Motion of Underwater Gliders: Modeling, Analysis, and Experimental Results,” Ocean Engineering, Vol.60, pp. 1-13, 2013.
- [12] W. Chuanfeng, Z. Fumin, and D. Schaefer, “Dynamic Modeling of an Autonomous Underwater Vehicle,” J. of Marine Science and Technology, Vol.20, No.2, pp. 199-212, 2015.
- [13] S. Mansoorzadeh and E. Javanmard, “An Investigation of Free Surface Effects on Drag and Lift Coefficients of an Autonomous Underwater Vehicle (AUV) Using Computational and Experimental Fluid Dynamics Methods,” J. of Fluids and Structures, Vol.51, pp. 161-171, 2014.
- [14] D. Xia, W. Chen, J. Liu, Z. Wu, and Y. Cao, “The Three-Dimensional Hydrodynamics of Thunniform Swimming Under Self-Propulsion,” Ocean Engineering, Vol.110, pp. 1-14, 2015.
- [15] A. N. Hayati, S. M. Hashemi, and M. Shams, “A Study on the Effect of the Rake Angle on the Performance of Marine Propellers,” Proc. of the Institution of Mechanical Engineers, Part C, J. of Mechanical Engineering Science, Vol.226, No.4, pp. 940-955, 2012.
- [16] K. Nering and K. Rup, “An Improved Algebraic Model for Bypass Transition for Calculation of Transitional Flow in Parallel-Plate Channel,” Int. J. of Thermal Sciences, Vol.135, pp. 471-477, 2019.
- [17] Z. Hao and C. Gorlé, “Large Eddy Simulations of Forced Heat Convection in a Pin-Fin Array with a Priori Examination of an Eddy-Viscosity Turbulence Model,” Int. J. of Heat and Fluid Flow, Vol.77, pp. 73-83, 2019.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.