Paper:
Development of Non-Wearing Type Pneumatic Power Assist Device – Basic Concept and Performance Evaluation –
Masashi Yokota* and Masahiro Takaiwa**
*Graduate School Advanced Technology and Science, Tokushima University
2-1 Minamijyousanjima-cho, Tokushima 770-8506, Japan
**Graduate School of Technology, Industrial and Social Sciences, Tokushima University
2-1 Minamijyousanjima-cho, Tokushima 770-8506, Japan

In Japan, where aging is faster than ever, the shortage of a young labor force is a serious problem, especially in the nursing field to support care recipients and in the primary industrial field to support heavy labor. Hence, the use of power assist devices that mechanically reduce the burden on the body is drawing increasing attention. This study focuses on the lifting motion, which can be performed by two methods, the squat method and the stoop method; the former involves bending the knee and the latter involves using the waist. The squat method is recommended because the burden on the waist is lower than that in the case of the stoop method. Currently, many types of wearable power assist devices to reduce the burden on the waist have been developed; however, they are based on the stoop method because of their assist mechanism. In this study, we developed a non-wearing type pneumatic power assist device that allows the squat method. After describing the basic concept and assist mechanism, the support effects are confirmed through experiments.
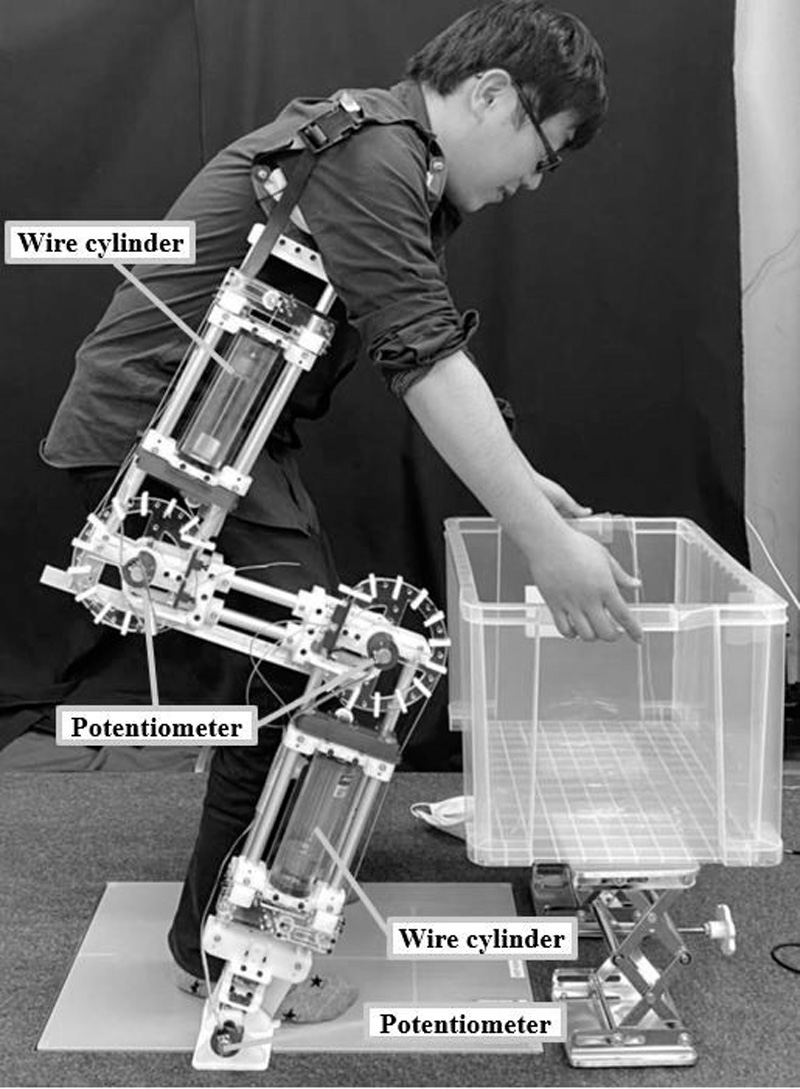
Non-wearing type power assist device
- [1] Ministry of Health, Labor and Welfare, “Occupational Disease Occurrence Survey Report,” 2018 (in Japanese).
- [2] X. Li, T. Noritsugu, M. Takaiwa, and D. Sasaki, “Design of Wearable Power Assist Wear for Low Back Support Using Pneumatic Actuators,” J. Robot. Mechatron., Vol.7, No.2, pp. 228-236, 2013.
- [3] S. Kawai, K. Naruse, H. Yokoi, and Y. Kakazu, “An Analysis of Human Motion for Control of a Wearable Power Assist System,” J. Robot. Mechatron., Vol.16, No.3, pp. 237-244, 2004.
- [4] K. Naruse, S. Kawai, H. Yokoi, and Y. Kaikazu, “Design of Wearable Power-Assist Device for Lower Back Support,” J. Robot. Mechatron., Vol.16, No.5, pp. 489-496, 2004.
- [5] S. Mamiya, T. Takahashi, and N. Uchiyama, “Design and Experimental Verification of a Pantograph-Based Mechanism for Lower Limb Load Reduction by Compensating for Upper Body Weight,” J. Robot. Mechatron., Vol.30, No.1, pp. 33-42, 2018.
- [6] Y. Naruoka, N. Hiramitsu, and Y. Mitsuya, “A Study of Power-Assist Technology to Reduce Body Burden During Loading and Unloading Operations by Support of Knee Joint Motion,” J. Robot. Mechatron., Vol.28, No.6, pp. 949-957, 2016.
- [7] T. Noritsugu, D. Sasaki, M. Kameda, A. Fukunaga, and M. Takaiwa, “Wearable Power Assist Device for Standing Up Motion Using Pneumatic Rubber Artificial Muscles,” J. Robot. Mechatron., Vol.19, No.6, pp. 619-628, 2007.
- [8] K. Naminohira and M. Fujimura, “Electromyographic and Kinematical Study of Human Lifting Motion – Effect of Mass of Heavy Object on Motion Methods –,” Japanese Society of Occupational Medicine, Vol.58, pp. 234-239, 2010 (in Japanese).
- [9] K. Naminohira, M. Fujimura, and K. Shinkoda, “Electromyographic and Kinematic Study of Lifting Motion in Male Adults – Effects of Mass of the Object on Motion Patterns (The Second Report) –,” Japanese Society of Occupational Medicine, Vol.59, pp. 245-250, 2011 (in Japanese).
- [10] M. Fujimura and I. Nara, “The influence on lumbago in lifting weights measured by electrocardiography,” Japanese Society of Occupational Medicine, Vol.52, pp. 341-347, 2004 (in Japanese).
- [11] Ministry of Health, Labor and Welfare, “National Health and Nutrition Survey Report,” 2017 (in Japanese).
- [12] D. B. Chaffin and G. B. J. Andersson, “Occupational Biomechanics,” Wiley, 1984.
- [13] Ministry of Health, Labor and Welfare, “Promotion of the Preventive Measures against Low Back Pain,” Labor Standards Bureau Notification No.0618-1, June 18, 2013 (in Japanese).
- [14] M. Takaiwa and T. Noritsugu, “Positioning control of pneumatic parallel manipulator,” Int. J. Automation Technol., Vol.2, No.1, pp. 49-55, 2008.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.