Paper:
Development of Finger-Wrist Rehabilitation Device Using Pneumatically Driven Parallel Sticks
Yasuko Matsui*, Daiki Hosomi**, and Masahiro Takaiwa*
*Graduate School of Technology, Industrial and Social Sciences, Tokushima University
2-1 Minamijyousanjima-cho, Tokushima 770-8506, Japan
**Graduate School of Advanced Technology and Science, Tokushima University
2-1 Minamijyousanjima-cho, Tokushima 770-8506, Japan

Japan has an aging population, and the number of patients with physical impairment is increasing owing to aging and accidents. A contracture is a state in which joint movements are worsened owing to the hardening and loss of elasticity of the surrounding soft tissue such as muscle and skin, when a patient is immobile or bedridden for long durations. In particular, finger and wrist contractures can cause many inconveniences in daily life. Thus far, some rehabilitation devices have been developed. A power assist glove extends the finger but is difficult for patients to wear. This study focuses on wearability and risk avoidance, and develops a device with two parallel sticks that are driven by pneumatic actuators to simulate the motion of a physical therapist. After verifying the fundamental control performances, the safety function based on the estimated force applied by the patient and the improvement of effectiveness in rehabilitation using a USB camera are discussed.
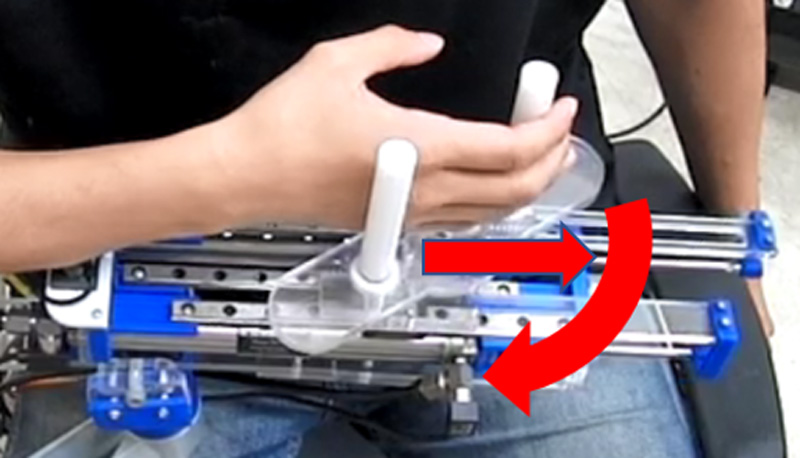
Developed finger-wrist rehabilitation device
- [1] T. Videman, “Connective tissue and immobilization. Key factors in musculoskeletal degeneration?,” Clin. Orthop. Relat. Res., Vol.221, pp. 26-32, 1987.
- [2] B. A. Nuismer, A. M. Ekes, and M. B. Holm, “The use of low-load prolonged stretch devices in rehabilitation programs in the Pacific northwest,” American J. of Occupational Therapy, Vol.51, No.7, pp. 538-543, 1997.
- [3] E. Carmeli, S. Peleg, G. Bartur, E. Elbo, and J.-J. Vatine, “HandTutor™ enhanced hand rehabilitation after stroke – a pilot study,” Physiotherapy Research Int., Vol.16, No.4, pp. 191-200, 2010.
- [4] C. N. Schabowsky, S. B. Godfrey, R. J. Holley et al., “Development and pilot testing of HEXORR: Hand EXOskeleton Rehabilitation Robot,” J. of NeuroEngineering and Rehabilitation, Vol.7, Article No.36, 2010.
- [5] S. Ueki et al., “Development of a Hand-Assist Robot With Multi-Degrees-of-Freedom for Rehabilitation Therapy,” IEEE/ASME Trans. on Mechatronics, Vol.17, No.1, pp. 136-146, 2012.
- [6] M. Aliff, S. Dohta, and T. Akagi, “Simple Trajectory Control Method of Robot Arm Using Flexible Pneumatic Cylinders,” J. Robot. Mechatron., Vol.27, No.6, pp. 698-705, 2015.
- [7] A. H. AbdulKareem, A. S. Adila, and G. Husi, “Recent trends in robotic systems for upper-limb stroke recovery: A low-cost hand and wrist rehabilitation device,” 2018 2nd Int. Symp. on Small-scale Intelligent Manufacturing Systems (SIMS), pp. 1-6, 2018.
- [8] F. Klug et al., “An Anthropomorphic Soft Exosuit for Hand Rehabilitation,” 2019 IEEE 16th Int. Conf. on Rehabilitation Robotics (ICORR), pp. 1121-1126, 2019.
- [9] M. Takaiwa and T. Noritsugu, “Positioning control of pneumatic parallel manipulator,” Int. J. Automation Technol., Vol.2, No.1, pp. 49-55, 2008.
- [10] R. W. Bohannon and M. B. Smith, “Interrater Reliability of a Modified Ashworth Scale of Muscle Spasticity,” Physical Therapy, Vol.67, No.2, pp. 206-207, 1987.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.