Paper:
Load Reduction Control on Tool-Insertion Port for Laparoscopic Surgical Robot Using Semi-Active Joints
Koki Aizawa*, Daisuke Haraguchi**, and Kotaro Tadano***
*Department of Mechanical Engineering, Tokyo Institute of Technology
4259 Nagatsuta-cho, Midori-ku, Yokohama, Kanagawa 226-8503, Japan
**Department of Mechanical Engineering, National Institute of Technology, Tokyo College
1220-2 Kunugidamachi, Hachiohji, Tokyo 193-0997, Japan
***Institute of Innovative Research, Tokyo Institute of Technology
4259 Nagatsuta-cho, Midori-ku, Yokohama, Kanagawa 226-8503, Japan

In robotic surgery, the load exerted on the insertion port in the patient’s abdominal wall due to misalignment of the robot’s remote center of motion and the insertion port or external forces acting on the tip of the forceps during surgery, can not only stress the patient’s body but also increase the friction between the robotic forceps and the trocar, and adversely affect fine surgical manipulations or the accuracy of force estimation. To reduce such loads on the insertion port in robotic surgery, this study proposes a control method for a surgical assist robotic arm with semi-active joints. The control method was implemented on a six-degree-of-freedom pneumatically driven vertical multi-joint robotic arm with a two-axis gimbal joint (two semi-active joints) that only executes torque control, which was previously developed by the authors, and verified through an experiment. The load on the insertion port is reduced by applying torque control on the semi-active joints to compensate for the external forces on the forceps. We constructed a control system that includes a disturbance compensator and conducted a velocity-control experiment by subjecting the forceps constrained by the insertion port to an external force. The results showed that when the torque was compensated for by the semi-active joints, the load on the insertion port was reduced by 65% and 52% when the external force on the tip of the forceps was 0 N and 3 N, respectively.
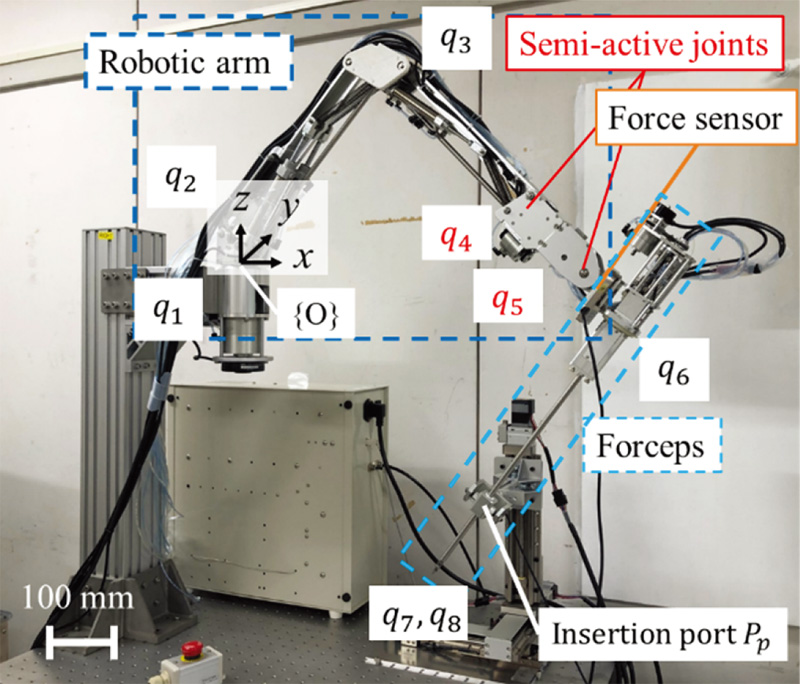
Surgical robotic arm with semi-active joints
- [1] C. Freschi, V. Ferrari, F. Melfi, M. Ferrari, F. Mosca, and A. Cuschieri, “Technical review of the da Vinci surgical telemanipulator,” Int. J. Med. Robot. Comput. Assist. Surg., Vol.9, No.4, pp. 396-406, 2013.
- [2] K. Tadano, K. Kawashima, K. Kojima, and N. Tanaka, “Development of a Pneumatic Surgical Manipulator IBIS IV,” J. Robot. Mechatron., Vol.22, No.2, pp. 179-188, 2010.
- [3] M. Mitsuishi et al., “Master-slave robotic platform and its feasibility study for micro-neurosurgery,” Int. J. Med. Robot. Comput. Assist. Surg., Vol.9, No.2, pp. 180-189, 2013.
- [4] S. Aksungur, “Remote Center of Motion (RCM) Mechanism for Surgical Operation,” Int. J. Appl. Mathmatics, Electron. Comput., Vol.3, No.2, pp. 119-126, 2015.
- [5] U. Hagn et al., “The DLR MIRO: A versatile lightweight robot for surgical applications,” Ind. Rob., Vol.35, No.4, pp. 324-336, 2008.
- [6] H. Sadeghian, F. Zokaei, and S. Hadian Jazi, “Constrained Kinematic Control in Minimally Invasive Robotic Surgery Subject to Remote Center of Motion Constraint,” J. Intell. Robot. Syst. Theory Appl., Vol.95, No.3-4, pp. 901-913, 2019.
- [7] M. Ghodoussi, S. E. Butner, and Y. Wang, “Robotic surgery – The transatlantic case,” Proc. of IEEE Int. Conf. Robot. Autom., Vol.2, pp. 1882-1888, 2002.
- [8] J. M. Sackier and Y. Wang, “Robotically assisted laparoscopic surgery – From concept to development,” Surg. Endosc., Vol.8, No.1, pp. 63-66, 1994.
- [9] W. Wang, J. Li, S. Wang, H. Su, and X. Jiang, “System design and animal experiment study of a novel minimally invasive surgical robot,” Int. J. Med. Robot. Comput. Assist. Surg., Vol.12, No.1, pp. 73-84, 2016.
- [10] G. Scozzari, M. Zanini, F. Cravero, R. Passera, F. Rebecchi, and M. Morino, “High incidence of trocar site hernia after laparoscopic or robotic Roux-en-Y gastric bypass,” Surg. Endosc., Vol.28, No.10, pp. 2890-2898, doi: 10.1007/s00464-014-3543-5, 2014.
- [11] K. Aizawa, M. Kanazawa, D. Haraguchi, and K. Tadano, “Development of a surgical robotic arm not requiring positioning on an insertion port with semi-active joints,” Proc. JSME Annu. Conf. Robot. Mechatronics, 2019 (in Japanese).
- [12] K. Aizawa, M. Kanazawa, D. Haraguchi, and K. Tadano, “Surgical Robotic Arm with Pneumatic Semi-active Joints for Load Reduction on Tool-insertion Port,” Sensors and Materials, Vol.32, No.3, pp. 1015-1026, 2020.
- [13] K. Kawashima, T. Sasaki, T. Miyata, N. Nakamura, M. Sekiguchi, and T. Kagawa, “Development of Robot Using Pneumatic Artificial Rubber Muscles to Operate Construction Machinery,” J. Robot. Mechatron., Vol.16, No.1, pp. 8-16, 2004.
- [14] D. Haraguchi, K. Tadano, and K. Kawashima, “Development of a Pneumatically-Driven Forceps Manipulator Using a Flexible Joint,” Proc. 8th JFPS Int. Symp. Fluid Power, Okinawa 2011, pp. 619-625, 2011.
- [15] S. Komada, M. Ishida, K. Ohnishi, and T. Hori, “Disturbance Observer-Based Motion Control of Direct Drive Motors,” IEEE Trans. Energy Convers., Vol.6, No.3, pp. 553-559, 1991.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.