Paper:
Experimental Study on Critical Design of Electro-Hydrostatic Actuators Small in Size and Light in Weight
Mitsuo Komagata*, Tianyi Ko*, Ko Yamamoto*, and Yoshihiko Nakamura**
*Department of Mechano-Informatics, Graduate School of Information Science and Technology, The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan
**Research into Artifacts, Center for Engineering (RACE), Graduate School of Engineering, The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan

Actuation systems for robots and other machines used in critical applications is an area that requires further research. In such applications, a machine works in a human environment and physically interacts with humans. Reliability and backdrivability are still insufficient in current systems. An electro-hydrostatic actuator has the potential advantage of high reliability by nature and high backdrivability in mechanical simplexity when it is designed to be small and light. This study provides a theoretical investigation of the methods for evaluating internal leaks and other mechanical losses, such as Coulomb and viscous friction, and experimentally evaluates two types (trochoid and involute gear) of prototyped hydraulic pumps.
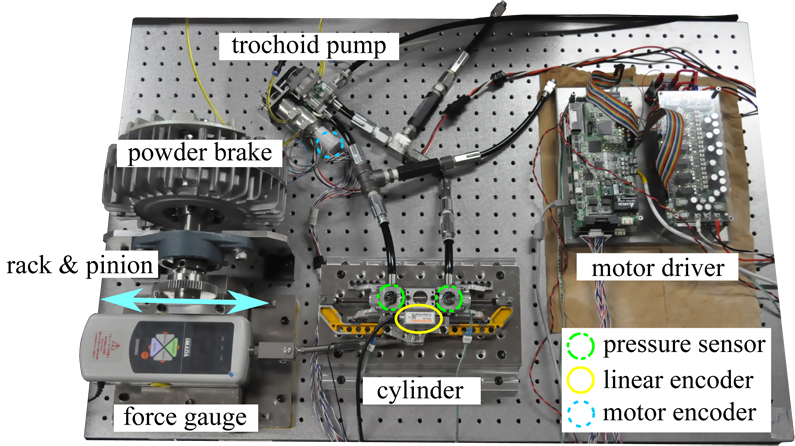
Experimental device for measuring the losses in driving linear EHA
- [1] K. Kobayashi, T. Yoshikai, and M. Inaba, “Development of Humanoid with Distributed Soft Flesh and Shock-Resistive Joint Mechanism for Self-Protective Behaviors in Impact from Falling Down,” Proc. of IEEE Int. Conf. on Robotics and Biomimetics, Vol.1, pp. 2390-2396, doi: 10.1109/ROBIO.2011.6181656, 2011.
- [2] M. G. Catalano, G. Grioli, A. Serio, E. Farnioli, C. Piazza, and A. Bicchi, “Adaptive Synergies for a Humanoid Robot Hand,” Proc. of IEEE-RAS Int. Conf. on Humanoid Robots, pp. 7-14, doi: 10.1109/HUMANOIDS.2012.6651492, 2012.
- [3] A. M. M. Omer, R. Ghorbani, H. Lim, and A. Takanishi, “Simulation of Semi-Passive Dynamic Walking for Humanoid Robots,” Proc. of IEEE-RAS Int. Conf. on Humanoid Robots, pp. 541-544, doi: 10.1109/ICHR.2008.4756028, 2008.
- [4] K. Kaneko, F. Kanehiro, M. Morisawa, K. Akachi, G. Miyamori, A. Hayashi, and N. Kanehira, “Humanoid Robot HRP-4 – Humanoid Robotics Platform with Lightweight and Slim Body,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4400-4407, doi: 10.1109/IROS.2011.6094465, 2011.
- [5] K. Kojima, T. Karasawa, T. Kozuki, E. Kuroiwa, S. Yukizaki, S. Iwaishi, T. Ishikawa, R. Koyama, S. Noda, F. Sugai, S. Nozawa, Y. Kakiuchi, K. Okada, and M. Inaba, “Development of Life-Sized High-Power Humanoid Robot JAXON for Real-World Use,” Proc. of IEEE-RAS Int. Conf. on Humanoid Robots, pp. 838-843, doi: 10.1109/HUMANOIDS.2015.7363459, 2015.
- [6] K. Hashimoto, S. Kimura, N. Sakai, S. Hamamoto, A. Koizumi, X. Sun, T. Matsuzawa, T. Teramachi, Y. Yoshida, A. Imai, K. Kumagai, T. Matsubara, K. Yamaguchi, G. Ma, and A. Takanishi, “WAREC-1 – A Four-Limbed Robot Having High Locomotion Ability with Versatility in Locomotion Styles,” Proc. of IEEE Int. Symp. on Safety, Security and Rescue Robotics, pp. 172-178, doi: 10.1109/SSRR.2017.8088159, 2017.
- [7] G. A. Pratt and M. M. Williamson, “Series Elastic Actuators,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems. Human Robot Interaction and Cooperative Robots, Vol.1, pp. 399-406, doi: 10.1109/IROS.1995.525827, 1995.
- [8] Y. Fujimoto, T. Kominami, and H. Hamada, “Development and Analysis of a High Thrust Force Direct-Drive Linear Actuator,” IEEE Trans. on Industrial Electronics, Vol.56, No.5, pp. 1383-1392, doi: 10.1109/TIE.2009.2012419, 2009.
- [9] N. Paine and L. Sentis, “A New Prismatic Series Elastic Actuator with Compact Size and High Performance,” Proc. of IEEE Int. Conf. on Robotics and Biomimetics, pp. 1759-1766, doi: 10.1109/ROBIO.2012.6491222, 2012.
- [10] T. Kosaki and S. Li, “A Water-Hydraulic Upper-Limb Assistive Exoskeleton System with Displacement Estimation,” J. Robot. Mechatron., Vol.32, No.1, pp. 149-156, doi: 10.20965/jrm.2020.p0149, 2020.
- [11] J. E. Bobrow and J. Desai, “A High Torque to Weight Ratio Robot Actuator,” Robotica, pp. 201-208, doi: 10.1017/S0263574700017719, 1995.
- [12] S. Habibi and A. Goldenberg, “Design of a New High-Performance Electrohydraulic Actuator,” IEEE/ASME Trans. on Mechatronics, pp. 158-164, doi: 10.1109/3516.847089, 2000.
- [13] H. Kaminaga, T. Ko, R. Masumura, M. Komagata, S. Sato, S. Yorita, and Y. Nakamura, “Mechanism and Control of Whole-Body Electro-Hydrostatic Actuator Driven Humanoid Robot Hydra,” Int. Symp. on Experimental Robotics, pp. 656-665, doi: 10.1007/978-3-319-50115-4_57, 2016.
- [14] H. Tanaka, H. Kaminaga, and Y. Nakamura, “Pressure Feedback Control Based on Singular Perturbation Method of an Electro-Hydrostatic Actuator for an Exoskeletal Power-Assist System,” J. Robot. Mechatron., Vol.24, No.2, pp. 354-362, doi: 10.20965/jrm.2012.p0354, 2012.
- [15] H. Kaminaga, K. Odanaka, Y. Ando, S. Otsuki, and Y. Nakamura, “Evaluations on Contribution of Backdrivability and Force Measurement Performance on Force Sensitivity of Actuators,” Proc. of Int. Conf. on Intelligent Robots and Systems, pp. 4472-4477, doi: 10.1109/IROS.2013.6696999, 2013.
- [16] H. Kaminaga, S. Otsuki, and Y. Nakamura, “Development of High-Power and Backdrivable Linear Electro-Hydrostatic Actuator,” Proc. of IEEE-RAS Int. Conf. on Humanoid Robots, pp. 973-978, doi: 10.1109/HUMANOIDS.2014.7041481, 2014.
- [17] T. Ko, K. Yamamoto, K. Murotani, and Y. Nakamura, “Compliant Biped Locomotion of Hydra, an Electro-Hydrostatically Driven Humanoid,” Proc. of IEEE-RAS Int. Conf. on Humanoid Robots, pp. 587-592, doi: 10.1109/HUMANOIDS.2018.8624973, 2018.
- [18] E. Koc, “An Investigation into the Performance of Hydrostatically Loaded End-Plates in High Pressure Pumps and Motors: Movable Plate Design,” Wear, Vol.141, pp. 249-265, doi: 10.1016/0043-1648(91)90272-V, 1991.
- [19] M. Komagata, T. Ko, and Y. Nakamura, “Small Size Hydraulic Pumps with Low Heat Generation for Electro Hydrostatic Actuation of Humanoid Robots,” Proc. of IEEE-RAS Int. Conf. on Humanoid Robots, pp. 483-488, doi: 10.1109/HUMANOIDS.2018.8625055, 2018.
- [20] T. Kang, H. Kaminaga, and Y. Nakamura, “A Robot Hand Driven by Hydraulic Cluster Actuators,” Proc. of IEEE-RAS Int. Conf. on Humanoid Robots, pp. 39-44, doi: 10.1109/HUMANOIDS.2014.7041335, 2014.
- [21] T. Ko, H. Kaminaga, and Y. Nakamura, “Underactuated Four-Fingered Hand with Five Electro Hydrostatic Actuators in Cluster,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 620-625, doi: 10.1109/ICRA.2017.7989077, 2017.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.