Paper:
A Sliding Mode Controller Using an LS-SVM Model for a Water-Hydraulic Artificial Rubber Muscle
Takahiro Kosaki, Yuta Kawahara, and Shigang Li
Department of Systems Engineering, Graduate School of Information Sciences, Hiroshima City University
3-4-1 Ozuka-higashi, Asaminami-ku, Hiroshima 731-3194, Japan

We describe a sliding mode controller design for an artificial rubber muscle driven by tap-water pressure. The hysteretic characteristics of this water-hydraulic artificial rubber muscle (WARM) often deteriorate its control accuracy. To cope with this complicated hysteresis, a modeling approach based on the least squares support vector machine (LS-SVM) with nonlinear kernel functions is first applied to a WARM. By employing this LS-SVM-based WARM model, a sliding mode controller is then derived for the WARM drive system. We verify the control performance of the proposed controller and compare its tracking accuracy with our previously developed controller through experiments.
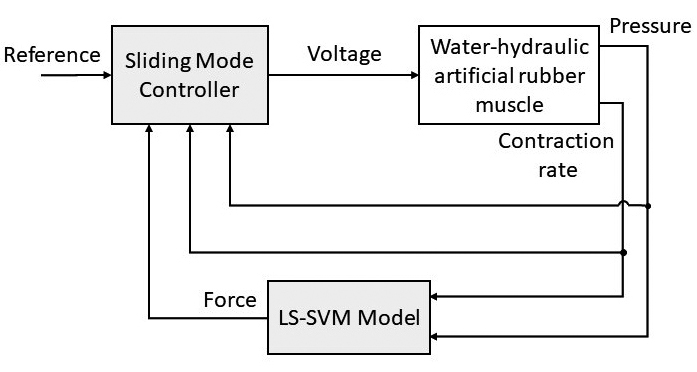
Sliding mode control system with an LS-SVM model
- [1] K. Inoue, “Rubbertuators and Applications for Robots,” Proc. the 4th Int. Symp. on Robotics Research, pp. 57-63, 1988.
- [2] F. Daerden and D. Lefeber, “Pneumatic Artificial Muscles: Actuators for Robotics and Automation,” European J. of Mechanical and Environmental Engineering, Vol.47, No.1, pp. 10-21, 2002.
- [3] B. Tondu, “Modelling of the McKibben Artificial Muscle: A Review,” J. of Intelligent Material Systems and Structures, Vol.23, No.3, pp. 225-253, 2012.
- [4] T. Kosaki, A. Nitanda, K. Atsuumi, and S. Li, “Development of an Elbow Power Assist Device with a Water-Hydraulic Muscle Actuator,” Trans. of the JSME, Vol.82, No.841, doi: 10.1299/transjsme.16-00174, 2016 (in Japanese).
- [5] T. Kosaki and S. Li, “A Water-Hydraulic Upper-Limb Assistive Exoskeleton System with Displacement Estimation,” J. Robot. Mechatron., Vol.32, No.1, pp. 149-156, 2020.
- [6] C. P. Chou and B. Hannaford, “Measurement and Modeling of McKibben Pneumatic Artificial Muscles,” IEEE Trans. on Robotics and Automation, Vol.12, No.1, pp. 90-102, 1996.
- [7] B. Tondu and P. Lopez, “Modeling and Control of McKibben Artificial Muscle Robot Actuators,” IEEE Control Systems Magazine, Vol.20, No.2, pp. 15-38, 2000.
- [8] K. Urabe and K. Kogiso, “Hybrid Nonlinear Model of McKibben Pneumatic Artificial Muscle Systems Incorporating a Pressure-Dependent Coulomb Friction Coefficient,” Proc. 2015 IEEE Conf. on Control Applications, pp. 1571-1578, 2015.
- [9] T. Kosaki, A. Minesaki, and M. Sano, “Adaptive Hysteresis Compensation with a Dynamic Hysteresis Model for Control of a Pneumatic Muscle Actuator,” J. of Environment and Engineering, Vol.7, No.1, pp. 53-65, 2012.
- [10] T. Vo-Minh, T. Tjahjowidodo, H. Ramon, and H. V. Brussel, “A New Approach to Modeling Hysteresis in a Pneumatic Artificial Muscle Using The Maxwell-Slip Model,” IEEE Trans. Mechatronics, Vol.16, No.1, pp. 177-186, 2011.
- [11] K. K. K. Ku, R. S. Bradbeer, K. K. Y. Lam, L. F. Yeung, and R. C. W. Li, “A Novel Actuator for Underwater Robots,” IEEE J. of Ocean Engineering, Vol.34, No.3, pp. 331-342, 2009.
- [12] W. Kobayashi and K. Ito, “Displacement Control of Water Hydraulic McKibben Muscle (1st Report: Modeling of a Muscle and Application of Bouc-Wen Model),” Trans. of the Japan Fluid Power System Society, Vol.45, No.6, pp. 85-91, 2014 (in Japanese).
- [13] W. Kobayashi, K. Ito, and S. Yamamoto, “Displacement Control of Water Hydraulic McKibben Muscles with Load Compensation,” JFPS Int. J. of Fluid Power System, Vol.8, No.2, pp. 107-112, 2015.
- [14] S. Yu, B. Shirinzadeh, G. Alici, and J. Smith, “Sliding Mode Control of a Piezoelectric Actuator with Neural Network Compensating Rate-Dependent Hysteresis,” Proc. the 2005 IEEE Int. Conf. on Robotics and Automation, pp. 3641-3645, 2005.
- [15] L. Cheng, W. Liu, Z.-G. Hou, J. Yu, and M. Tan, “Neural-Network-Based Nonlinear Model Predictive Control for Piezoelectric Actuators,” IEEE Trans. on Industrial Electronics, Vol.62, No.12, pp. 7717-7727, 2015.
- [16] P.-K. Wong, Q. Xu, C.-M. Vong, and H.-C. Wong, “Rate-Dependent Hysteresis Modeling and Control of a Piezostage Using Online Support Vector Machine and Relevance Vector Machine,” IEEE Trans. on Industrial Electronics, Vol.59, No.4, pp. 1988-2001, 2012.
- [17] J. A. K. Suykens, “Support Vector Machines: A Nonlinear Modeling and Control Perspective,” European J. of Control, Vol.7, pp. 311-327, 2001.
- [18] Y. Kawahara, T. Kosaki, and S. Li, “Control of a Water-Hydraulic Artificial Muscle Actuator Using a Hysteresis Model Based on Least Squares Support Vector Machines,” Proc. SICE Annual Conf. 2019, pp. 1020-1023, 2019.
- [19] Y. Kawahara, T. Kosaki, and S. Li, “LS-SVM Based Modeling and Model Predictive Control for a Water-Hydraulic Artificial Muscle Actuator,” SICE J. Control, Measurement, and System Integration, Vol.13, No.3, pp. 114-121, 2020.
- [20] J. M. Maciejowski, “Predictive Control with Constraints,” Pearson, 2002.
- [21] K. Nonami and H. Tian, “Sliding Mode Control,” Corona Publishing Co., Ltd., 1994 (in Japanese).
- [22] J. Y. Hung, W. Gao, and J. C. Hung, “Variable Structure Control: A Survey,” IEEE Trans. Industrial Electronics, Vol.40, No.1, pp. 2-23, 1993.
- [23] D. Pebrianti, W. Wang, D. Iwakura, Y. Song, and K. Nonami, “Sliding Mode Controller for Stereo Vision Based Autonomous Flight of Quad-Rotor MAV,” J. Robot. Mechatron., Vol.23, No.1, pp. 137-148, 2011.
- [24] T. Matsushita, S. Sagara, T. Yamashita, and T. Taniguchi, “Force Control of One-Link Robot Hand with Rubbertuator – Application of Digital Sliding Mode Control –,” J. the Robotics Society of Japan, Vol.11, No.3, pp. 461-467, 1993 (in Japanese).
- [25] D. Cai and Y. Dai, “A Sliding Mode Controller for Manipulator Driven by Artificial Muscle Actuator,” IEICE Trans. Fundamentals of Electronics, Communications and Computer Sciences, Vol.J85-A, No.3, pp. 290-297, 2002 (in Japanese).
- [26] K. Xing, J. Huang, Y. Wang, J. Wu, Q. Wu, and J. He, “Tracking Control of Pneumatic Artificial Muscle Actuators Based on Sliding Mode and Non-linear Disturbance Observer,” IET Control Theory Appl., Vol.4, Issue 10, pp. 2058-2070, 2010.
- [27] K. Ito, H. Takahashi, S. Ikeo, and K. Takahashi, “Robust Control of Water Hydraulic Servo Motor System Using Sliding Mode Control with Disturbance Observer,” SICE-ICASE Int. Joint Conf., pp. 4659-4662, 2006.
- [28] Y. Yong, “Position Variable Structure Control for Water Hydraulic Vane Actuator,” 12th Int. Conf. Control, Automation, Robotics & Vision, pp. 1170-1174, 2012.
- [29] C. M. Bishop, “Pattern Recognition and Machine learning,” Springer, 2006.
- [30] T. Kimura, S. Hara, T. Fujita, and T. Kagawa, “Feedback Linearization for Pneumatic Actuator Systems with Static Friction,” Control Engineering Practice, Vol.5, No.10, pp. 1385-1394, 1997.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.