Paper:
Flexible Pneumatic Bending Actuator for a Robotic Tongue
Nobutsuna Endo, Yuta Kizaki, and Norihiro Kamamichi
Tokyo Denki University
5 Senju Asahi-cho, Adachi-ku, Tokyo 120-8551, Japan

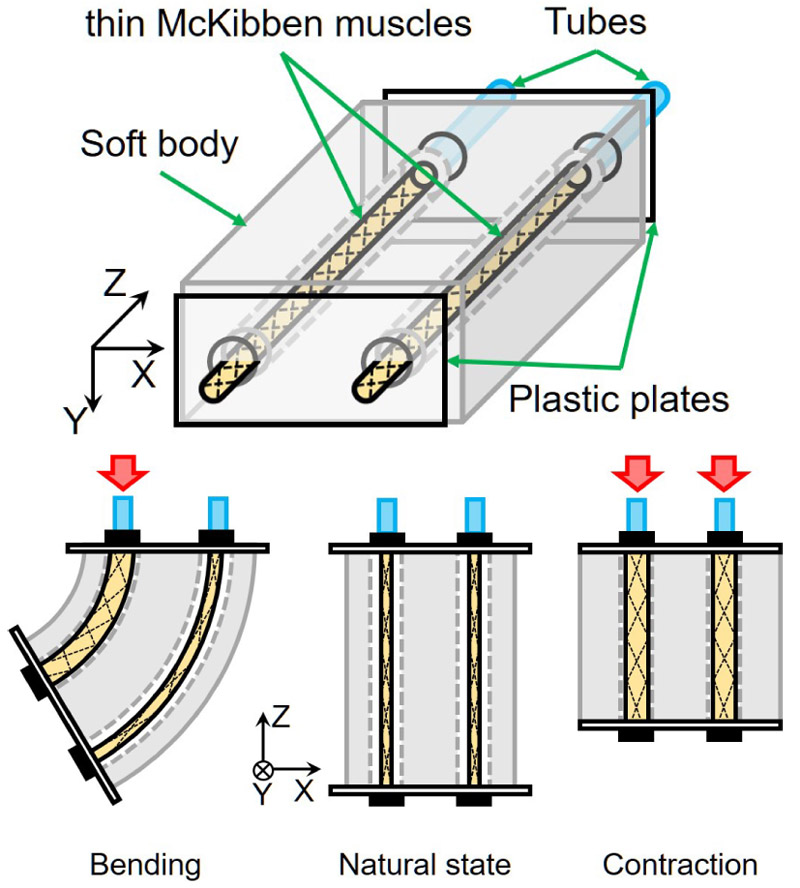
There are not many physical models of oral and laryngeal systems for human speech movement in both computer simulators and mechanical simulators. In particular, there is no robot tongue mechanism that completely reproduces the deformation motion of the human tongue. The human tongue is an aggregate of muscles devoid of a skeleton. It only possesses a small hyoid. The purpose of this study is to develop a flexible actuator without a rigid link, aiming at the development of a tongue mechanism for a mechanical speech robot. We propose a flexible pneumatic bending actuator using thin McKibben muscles and a soft body formed by a silicone resin. We have verified its mechanical characteristics and described a control method for displacement and curvature. The elasticity/compliance of the silicone resin forming the soft body of this actuator was quantified by tensile tests. The oscillation parameters were identified, and it is suggested that the dynamic model can be described by a spring-mass-damper system. Assuming an arc-shaped deformation model, a simultaneous control system for the arc length and curvature was constructed and its effectiveness was confirmed.
Flexible pneumatic bending actuator
- [1] K. Fukui, K. Nishikawa, S. Ikeo, E. Shintaku, K. Takada, H. Takanobu, M. Honda, and A. Takanishi, “Development of a talking robot with vocal cords and lips having human-like biological structures,” Proc. of the 2005 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2005), pp. 2526-2531, 2005.
- [2] K. Fukui, Y. Ishikawa, K. Ohno, N. Sakakibara, M. Honda, and A. Takanishi, “Three dimensional tongue with liquid sealing mechanism for improving resonance on an anthropomorphic talking robot,” Proc. of the 2009 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2009), pp. 5456-5462, 2009.
- [3] Y. Yoshikawa, M. Asada, K. Hosoda, and J. Koga, “A constructivist approach to infants’ vowel acquisition through mother-infant interaction,” Connection Science, Vol.15, No.4, pp. 245-258, 2003.
- [4] H. Takanobu, K. Nakamura, A. Takanishi, K. Ohtsuki, D. Ozawa, M. Ohnishi, and A. Okino, “Human skull robot as a mechanical patient simulator for mouth opening and closing training,” Proc. of the 2001 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2001), pp. 2154-2159, 2001.
- [5] J. Jung, R. S. Penning, N. J. Ferrier, and M. R. Zinn, “A modeling approach for continuum robotic manipulators: Effects of nonlinear internal device friction,” Proc. of the 2011 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2011), pp. 5139-5146, 2011.
- [6] K. Hsiao, H. Mochiyama, T. Takei, E. Shinotsuka, and K. Ogawa, “Continuum Manipulator with Rubber Skin Layer including Pulling-wire Mechanism,” J. of the Robotics Society of Japan, Vol.35, No.3, pp. 221-229, 2017 (in Japanese).
- [7] S. Kikuchi, Y. Yamada, R. Higashi, and T. Morita, “Super Multi-Joint Manipulator by Using Creased Plate and Pneumatic Actuators Arranged Antagonistically,” J. Robot. Mechatron., Vol.27, No.3, pp. 276-285, 2015.
- [8] K. Sawada, K. Osuka, and T. Ono, “On Soft Machine – Toward the realization of Mechanical Speech Synthesizer –,” Proc. of the 1999 IEEE Int. Conf. on Systems, Man, and Cybernetics (SMC ’99), pp. 978-983, 1999.
- [9] R. Hofe and R. K. Moore, “Towards an investigation of speech energetics using ‘AnTon’: an animatronic model of a human tongue and vocal tract,” Connection Science, Vol.20, No.4, pp. 319-336, 2008.
- [10] M. Kataoka, T. Yoshida, T. Kojima, N. Endo, and M. Asada, “Development of a flexible tounge mechanism ZETS by using flexible pneumatic actuators,” Proc. of the 17th SICE System Integration Division Annual Conf., pp. 741-745, 2016 (in Japanese).
- [11] X. Lu, W. Xu, and X. Li, “A Soft Robotic Tongue – Mechatronic Design and Surface Reconstruction,” IEEE/ASME Trans. on Mechatronics, Vol.22, No. 5, pp. 2102-2110, 2017.
- [12] S. Kurumaya, H. Nabae, G. Endo, and K. Suzumori, “Design of thin McKibben muscle and multifilament structure,” Sensors and Actuators A: Physical, Vol.261, pp. 66-74, 2017.
- [13] Y. Kizaki, N. Endo, and N. Kamamichi, “Flexible Pneumatic Bending Actuator for Robotic Tongue – Basic verification of response characteristics –,” Proc. of the 38th Annual Conf. of the Robotics Society Japan, 3K3-03, 2018 (in Japanese).
- [14] N. Endo, T. Kojima, H. Ishihara, T. Horii, and M. Asada, “Design and Preliminary Evaluation of the Vocal Cords and Articulator of an Infant-like Vocal Robot “Lingua”,” Proc. of the 2014 IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids 2014), pp. 1063-1068, 2014.
- [15] R. J. Webster and B. A. Jones, “Design and Kinematic Modeling of Constant Curvature Continuum Robots: A Review,” The Int. J. of Robotics Research, Vol.29, No.13, pp. 1661-1683, 2010.
- [16] A. K. Mishra, A. Mondini, E. Del Dottore, A. Sadeghi, F. Tramacere, and B. Mazzolai, “Modular Continuum Manipulator: Analysis and Characterization of Its Basic Module,” Biomimetics, Vol.3, No.1, 3, 2018.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.