Paper:
Long Range Six Degree-of-Freedom Magnetic Levitation Using Low Cost Sensing and Control
Peter Berkelman* and Yu-Sheng Lu**
*Department of Mechanical Engineering, University of Hawaii
2540 Dole Street, Honolulu, HI 96822, USA
**Department of Mechatronic Engineering, National Taiwan Normal University
162, Section 1, Heping East Road, Taipei 106, Taiwan

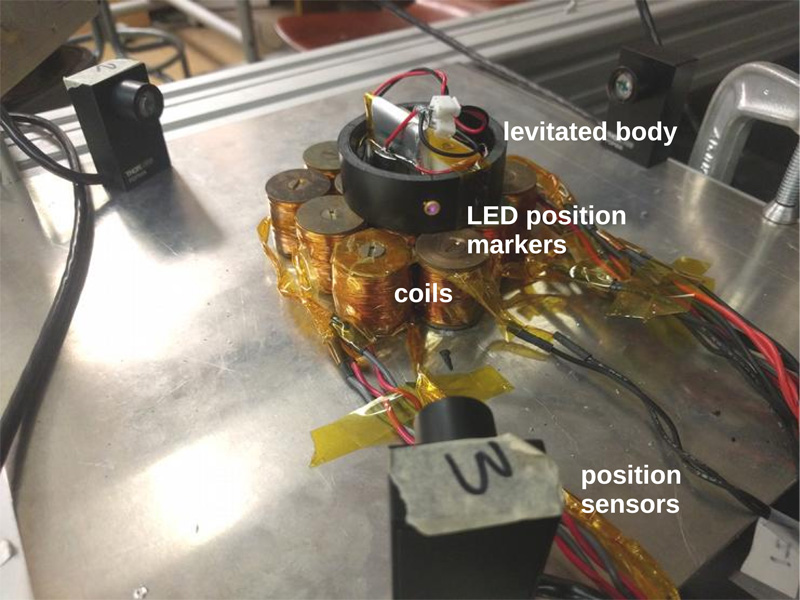
We have developed a magnetic levitation system which uses an array of cylindrical actuation coils and a set of three position sensing photodiode assemblies for controlled levitation of a moving platform of permanent magnets. The novelty of this system is that low cost, standard off-the-shelf commodity hardware and software components are used for position sensing and feedback control, rather than costly motion tracking sensing systems and controllers. The design and function of the system are described and controlled motion in all directions is demonstrated through motion ranges of 30 mm horizontal and 20 mm vertical translation, and 26° of roll and 43° of yaw rotation.
6-DOF maglev with low cost components
- [1] H. Yu and W.-J. Kim, “A compact hall-effect-sensing 6-dof precision positioner,” IEEE/ASME Trans. on Mechatronics, Vol.15, No.6, pp. 982-985, 2010.
- [2] W.-J. Kim and D. L. Trumper, “High-precision magnetic levitation stage for photolithography,” Precision Engineering, Vol.22, pp. 66-77, 1998.
- [3] W.-J. Kim, N. Bhat, and T. Hu, “Integrated multidimensional positioner for precision manufacturing,” Proc. of the Institution of Mechanical Engineers Part B: J. of Engineering Manufacturing, Vol.218, pp. 431-442, 2004.
- [4] Z. Ren and L. Stephens, “Closed-loop performance of a six degree of freedom precision magnetic actuator,” IEEE/ASME Trans. on Mechatronics, Vol.10, No.6, pp. 666-674, 2005.
- [5] S.-K. Kuo and C.-H. Menq, “Modeling and control of a six-axis precision motion control stage,” IEEE/ASME Trans. on Mechatronics, Vol.10, No.1, pp. 50-59, 2005.
- [6] J. Zhang and C.-H. Menq, “Six-axis magnetic levitation and motion control,” IEEE Trans. on Robotics, Vol.23, No.2, pp. 196-205, 2007.
- [7] M. Dyck, X. Lu, and Y. Altintas, “Magnetically levitated rotary table with six degrees of freedom,” IEEE/ASME Trans. on Mechatronics, Vol.22, No.1, pp. 530-540, 2017.
- [8] H. Zhu, T. J. Teo, and C. K. Pang, “Design and modeling of a six-degree-of-freedom magnetically levitated positioner using square coils and 1-d halbach arrays,” IEEE Trans. on Industrial Electronics, Vol.64, No.1, pp. 440-450, 2017.
- [9] D. G. Craig and M. B. Khamesee, “Motion control of a large gap magnetic suspension system for microrobotic manipulation,” J. of Physics D: Applied Physics, Vol.40, No.11, pp. 3277-3285, 2007.
- [10] M. B. Khamesee and E. Shameli, “Regulation technique for a large gap magnetic field for 3d non-contact manipulation,” Mechatronics, Vol.15, pp. 1073-1087, 2005.
- [11] D. Li and H. M. Gutierrez, “Quasi-sliding mode control of a high-precision hybrid magnetic suspension actuator,” J. Robot. Mechatron., Vol.25, No.1, pp. 192-200, 2013.
- [12] F. N. Koumboulis and M. G. Skarpetis, “Static controllers for magnetic suspension and balance systems,” IEEE Proc. – Control Theory and Applications, Vol.143, No.4, pp. 338-348, 1996.
- [13] R. Baheti, “Multivariable frequency domain controller for magnetic suspension and balance systems,” IEEE Trans. on Automatic Control, Vol.29, No.8, pp. 725-728, 1984.
- [14] N. J. Groom, “Simplified analytical model of a six-degree-of-freedom large-gap magnetic suspension system,” Technical Report TM-112868, NASA Langley Research Center, Hampton, Virginia, June 1997.
- [15] C. P. Britcher and M. Ghofrani, “A magnetic suspension system with a large angular range,” Review of Scientific Instruments, Vol.64, No.7, pp. 1910-1917, 1993.
- [16] H. Sawada, S. Suda, and T. Kunimasu, “NAL 60cm magnetic suspension and balance system,” Congress of Int. Council of the Aeronautical Sciences, p. 2004-3.1.2, August 2004.
- [17] R. L. Hollis and S. E. Salcudean, “Lorentz levitation technology: a new approach to fine motion robotics, teleoperation, haptic interfaces, and vibration isolation,” Proc. 6th Int. Symp. on Robotics Research, Hidden Valley, PA, pp. 2-5, October 1993.
- [18] R. L. Hollis, S. Salcudean, and A. P. Allan, “A six degree-of-freedom magnetically levitated variable compliance fine motion wrist: design, modeling, and control,” IEEE Trans. on Robotics and Automation, Vol.7, No.3, pp. 320-332, 1991.
- [19] S. Salcudean, N. M. Wong, and R. L. Hollis, “Design and control of a force-reflecting teleoperation system with magnetically levitated master and wrist,” IEEE Trans. on Robotics and Automation, Vol.11, No.2, pp. 844-858, 1995.
- [20] P. J. Berkelman and R. L. Hollis, “Lorentz magnetic levitation for haptic interaction: Device design, function, and integration with simulated environments,” Int. J. of Robotics Research, Vol.9, No.7, pp. 644-667, 2000.
- [21] P. Berkelman and M. Dzadovsky, “Magnetic levitation over large translation and rotation ranges in all directions,” IEEE/ASME Trans. on Mechatronics, Vol.18, No.1, pp. 44-52, 2013.
- [22] P. Berkelman and M. Dzadovsky, “Novel design, characterization, and control method for large motion range magnetic levitation,” IEEE Magnetics Letters, Vol.1, 0500104, 2010.
- [23] Thorlabs, “PDP90A Position Sensing Detector User Guide (Rev G Edition),” May 2017.
- [24] O. Chubar, P. Elleaume, and J. Chavanne, “A three-dimensional magnetostatics computer code for insertion devices,” J. of Synchrotron Radiation, Vol.5, pp. 481-484, 1998.
- [25] M. Miyasaka and P. Berkelman, “Magnetic levitation with unlimited omnidirectional rotation range,” Mechatronics, Vol.24, No.3, pp. 252-264, 2014.
- [26] E. Anderson, Z. Bai, C. Bischof, L. S. Blackford, J. Demmel, J. Dongarra, J. Du Croz, A. Greenbaum, S. Hammarling, A. McKenney et al., “LAPACK Users’ guide,” SIAM, 1999.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.