Paper:
Development of a Rehabilitation and Training Device Considering the Ankle Degree of Freedom
Asaki Akagi*, Satoki Tsuichihara*, Shinichi Kosugi**, and Hiroshi Takemura*
*Tokyo University of Science
2641 Yamazaki, Noda, Chiba 278-8510, Japan
**Nara Prefecture Seiwa Medical Center
1-14-16 Mimuro, Ikoma Sango, Nara 636-0802, Japan

While the number of people who need rehabilitation has been increasing because of the aging population, there are only a limited number of physical therapists engaged in rehabilitation, making it difficult to perform rehabilitation at a sufficient level. In this situation, various devices have been developed to replace physical therapists. However, no rehabilitation devices that can respond to the complicated degrees of freedom of an ankle joint complex (AJC) are commercially available. In the present study, we developed an AJC rehabilitation device using a Stewart platform parallel link mechanism. Using the device, we aim to measure and control the AJC with six degrees of freedom so that complicated composite motions of the AJC can be realized. To evaluate the device’s usefulness, we investigated how the composite motion generated by moving the AJC along the trajectory the device reproduced could influence a crural muscle. Muscular activities of the anterior tibial, soleus, and gastrocnemius muscles, generated by a composite motion of plantar flexion and inversion, had a similar feature to those generated by plantar flexion. However, the muscular activity of the peroneus longus muscle generated in the composite motion was significantly different from that generated only in plantar flexion. In the composite motion of plantar flexion and inversion, based on the knowledge that activity to develop only back muscles while suppressing muscular activities of the anterior tibial and peroneus longus muscles is possible. Based on the knowledge, the device was used to perform isokinetic contraction for evaluating the device’s usefulness for muscular training. We found a difference between the combination of active muscles during the composite motion and that during plantar flexion. A load can be applied to different muscles depending on the composite motion, which indicates that the device can be suitable for rehabilitation or training with high degrees of freedom.
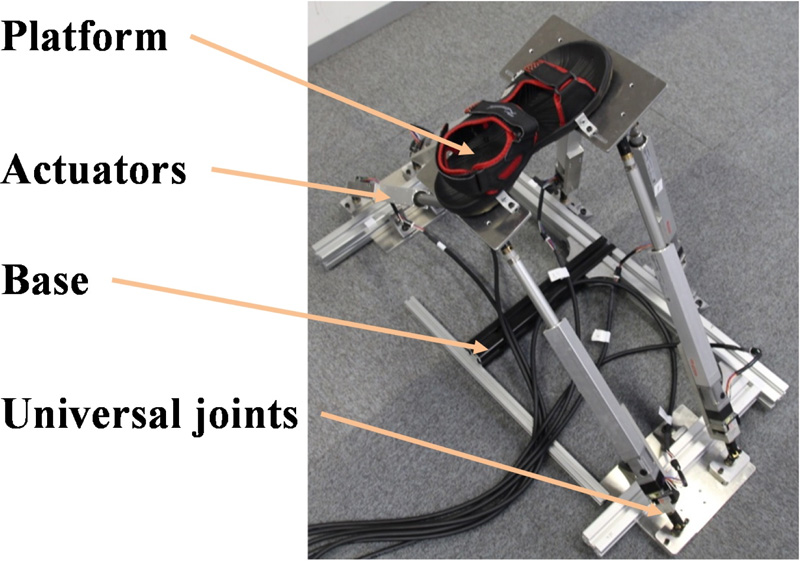
Overview of the developed device
- [1] K. Munenori, “The comparison of observation in the range of motion measurement and eye-estimation by the student,” The J. of Tokyo Academy of Health Sciences, Vol.1, pp. 71-73, 1998.
- [2] M. L. Aisen, H. I. Krebs, F. McDowell, N. Hogan, and B. Volpe, “The effect of robot assisted therapy and rehabilitative training on motor recovery following a stroke,” Arch. Neurology, Vol.54, pp. 443-446, 1997.
- [3] F. P. Beer and E. R. Johnston, “Vector Mechanics for Engineers: Statics. 5th edition,” McGraw-Hill Book Co., 1988.
- [4] A. Wilberth, V. Luis, B. Anders, G. Jose, and O. Marco, “Major Trends In The Development Of Ankle Rehabilitation Devices,” Dyna, Vol.79, No.176, pp. 45-55, 2012.
- [5] H. Sasanuma and H. Tsukagoshi, “Motion sock with safety function to support ankle movement,” Proc. of JSME Annual Conf. on Robotics and Mechatronics (Robomec), 2A1-I05, 2017.
- [6] Y. Ikeda and H. Kobayashi, “Development of the CPM Device for Ankle and Toes,” Proc. of JSME Annual Conf. on Robotics and Mechatronics (Robomec), 2A2-E03, 2018.
- [7] D. Kushida, T. Kanazawa, and A. Kitamura, “Construction of Lower Limbs Rehabilitation System Based on Bodily Feature and EMG,” IEEJ Trans. EIS, Vol.130, No.7, pp. 1132-1138, 2010.
- [8] D. Stewart, “A Platform with Six Degrees of Freedom,” Proc. of the Institution of Mechanical Engineers, Vol.180, No.15, pp. 371-386, 1965.
- [9] T. Onodera, M. Ding, H. Takemura, and H. Mizoguchi, “Design and Development of Stewart Plat-form-Type Assist Device For Ankle-Foot Rehabilitation,” 2012 1st Int. Conf. on Innovative Engineering Systems (ICIE2012), pp. 1-6, 2012.
- [10] K. Nomura, T. Yonezawa, H. Takemura, and H. Mizoguchi, “Development of Six-DOF Human Ankle Motion Control Device Using Stewart Platform Structure for Fall Prevention,” J. Robot. Mechatron., Vol.28, No.5, pp. 654-663, 2016.
- [11] T. Onodera, E. Suzuki, M. Ding, H. Takemura, and H. Mizoguchi, “Force, Stiffness and Viscous Damping Control of a Stewart-Platform-Type Ankle-Foot Rehabilitation Assist Device with Pneumatic Actuator,” J. Robot. Mechatron., Vol.26, No.6, pp. 897-905, 2013.
- [12] A. Siddiqi, S. P. Arjunan, and D. Kumar, “Improvement of isometric dorsiflexion protocol for assessment of tibialis anterior muscle strength,” MethodsX, Vol.2, pp. 107-111, 2015.
- [13] A. Biel, “Trail Guide to the Body (3rd edition),” Books of Discovery, 2005.
- [14] M. Schunke, E. Schulte, U. Schumacher, M. Voll, and K. Wesker, “Prometheus – Lernatlas der Anatomie. Allgemeine Anatomie und Bewegungssystem,” Thieme Georg Verlag, 2004 (in Germany).
- [15] D. Bhaskaran, M. Wortley, Q. Chen, C. E. Milner, E. C. Fitzhugh, and S. Zhang, “Effect of a combined inversion and plantarflexion surface on ankle kinematics and EMG activities in landing,” J. of Sport and Health Science, Vol.4, pp. 377-383, 2015.
- [16] M. Ding, K. Hirasawa, Y. Kurita, H. Takemura, H. Mizoguchi, J. Takamatsu, and T. Ogasawara, “Pinpointed muscle force control via optimising human motion and external force,” Int. J. of Mechatronics and Automation, Vol.2, No.3, pp. 147-156, 2012.
- [17] M. Ono, M. Yamato, N. Okada, and Y. Takahashi, “Comparative study on the effects of static training and dynamic training,” The Japanese J. of Physical Fitness and Sports Medicine, Vol.14, No.1, pp. 9-14, 1965 (in Japanese).
- [18] H. J. Hislop and J. J. Perrine, “The isokinetic concept of exercise,” Phys. Ther., Vol.47, No.2, pp. 114-117, 1967.
- [19] I. S. Hwang and L. D. Abraham, “Quantitative EMG analysis to investigate synergistic coactivation of ankle and knee muscles during isokinetic ankle movement. Part 1: time amplitude analysis,” J. of Electromyography and Kinesiology, Vol.11, pp. 319-325, 2001.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.