Paper:
Development of a Gripper with Variable Stiffness for a CT-Guided Needle Insertion Robot
Kento Yokouchi*1, Tetsushi Kamegawa*2, Takayuki Matsuno*3, Takao Hiraki*4, Takuya Yamaguchi*5, and Akio Gofuku*2
*1Rexxam Co., Ltd.
958 Ikeuchi, Konan-cho, Takamatsu-shi, Kagawa 761-1494, Japan
*2Graduate School of Interdisciplinary Science and Engineering in Health Systems, Okayama University
3-1-1 Tsushima-naka, Kita-ku, Okayama 700-8530, Japan
*3Graduate School of Natural Science and Technology, Okayama University
3-1-1 Tsushima-naka, Kita-ku, Okayama 700-8530, Japan
*4Department of Radiology, Medical School, Okayama University
2-5-1 Shikata-cho, Kita-ku, Okayama 700-8558, Japan
*5Division of Radiology, Department of Medical Technology, Okayama University Hospital
2-5-1 Shikata-cho, Kita-ku, Okayama 700-8558, Japan

In recent years, interventional radiology (IR) as a medical procedure has attracted considerable attention. Among the various IR techniques, computed tomography (CT)-guided IR is performed by inserting a specific needle into a lesion under CT guidance, leading to this medical procedure being less invasive. However, as the procedure requires the doctor to be positioned near the CT, radiation exposure may be a major concern. To overcome this problem, we developed a remote-controlled robotic system for needle insertion during CT-guided interventional procedures. The current needle holder for the robot is risky in that it might hurt a patient since a needle is always held firmly even when the patient moves. To solve this problem, we designed and fabricated a gripper with variable stiffness through jamming transition. Subsequently, we conducted experiments to investigate the effect of elements constituting the gripper to improve its performance.
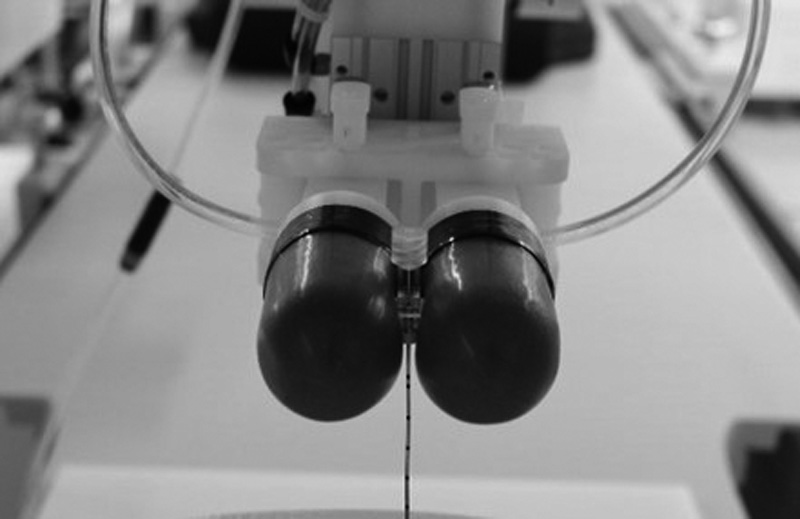
Prototype of the gripper with variable stiffness
- [1] T. Hiraki, T. Kamegawa, T. Matsuno, and S. Kanazawa, “Development of a Robot for CT Fluoroscopy-Guided Intervention: Free Physicians from Radiation,” The Official J. of the Japanese Society of Interventional Radiology, Vol.29, No.4, pp. 375-381, 2014 (in Japanese).
- [2] T. Hiraki, H. Gobara, H. Mimura, S. Toyooka, H. Fujiwara, K. Yasui, Y. Sano, T. Iguchi, J. Sakurai, N. Tajiri, T. Mukai, Y. Matsui, and S. Kanazawa, “Radiofrequency Ablation of Lung Cancer at Okayama University Hospital: A Review of 10 Years of Experience,” Acta Medica Okayama, Vol.65, No.5, pp. 287-297, 2011.
- [3] Y. Matsui, T. Hiraki, H. Gobara, T. Iguchi, H. Fujiwara, T. Kawabata, T. Yamauchi, T. Yamaguchi, and S. Kanazawa, “Radiation exposure of interventional radiologists during computed tomography fluoroscopy-guided renal cryoablation and lung radiofrequency ablation: direct measurement in a clinical setting,” Cardiovascular and Interventional Radiology, Vol.39, No.6, pp. 894-901, 2016.
- [4] B. Maurin, B. Bayle, O. Piccin, J. Gangloff, M. Mathelin, C. Doignon, P. Zanne, and A. Gangi, “A Patient-Mounted Robotic Platform for CT-Scan Guided Procedures,” IEEE Trans. on Biomedical Engineering, Vol.55, No.10, pp. 2417-2425, 2008.
- [5] Y. Koethe, S. Xu, G. Velusamy, B. J. Wood, and A. M. Venkatesan, “Accuracy and efficacy of percutaneous biopsy and ablation using robotic assistance under computed tomography guidance: a phantom study,” European Radiology, Vol.24, No.3, pp. 723-730, 2014.
- [6] D. Staianovici, K. Cleary, A. Patriciu, D. Mazilu, A. Stanimir, N. Craciunoiu, V. Watson, and L. Kavoussi, “AcuBot: A Robot for Radiological Interventions,” IEEE Trans. on Robotics and Automation, Vol.19, No.5, pp. 927-930, 2003.
- [7] H. Nakaya, T. Matsuno, T. Kamegawa, T. Hiraki, T. Inoue, A. Yanou, M. Minami, and A. Gofuku, “CT Phantom for Development of Robotic Interventional Radiology,” IEEE/SICE Int. Symp. on System Integration (SII), pp. 82-87, Tokyo, Japan, December 13-15, 2014.
- [8] K. Sugiyama, T. Matsuno, T. Kamegawa, T. Hiraki, H. Nakaya, A. Yanou, and M. Minami, “Reaction Force Analysis of Puncture Robot for CT-Guided Interventional Radiology in Animal Experiment,” IEEE/SICE Int. Symp. on System Integration (SII), pp. 7-12, Nagoya, Japan, December 11-13, 2015.
- [9] A. Heya, T. Kamegawa, T. Matsuno, T. Hiraki, and A. Gofuku, “Development of Instantaneously Puncture System for CT Fluoroscopy-Guided Interventional Radiology,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 2369-2374, Daejeon, Korea, October 9-14, 2016.
- [10] H. Ishii, T. Kamegawa, H. Kitamura, T. Matsuno, T. Hiraki, and A. Gofuku, “Development of a Prototype of Puncturing Robot for CT-Guided Intervention,” Proc. of the 11th IEEE Conf. on Industrial Electronics and Applications (ICIEA), pp. 1020-1025, Hefei, China, June 5-7, 2016.
- [11] K. Sugiyama, T. Matsuno, T. Kamegawa, T. Hiraki, H. Nakaya, M. Nakamura, A. Yanou, and M. Minami, “Needle Tip Position Accuracy Evaluation Experiment for Puncture Robot in Remote-Center Control,” J. Robot. Mechatron., Vol.28, No.6, pp. 911-920, 2016.
- [12] T. Hiraki, T. Kamegawa, T. Matsuno, J. Sakurai, Y. Kirita, R. Matsuura, T. Yamaguchi, T. Sasaki, T. Mitsuhashi, T. Komaki, Y. Masaoka, Y. Matsui, H. Fujiwara, T. Iguchi, H. Gobara, and S. Kanazawa, “Robotically Driven CT-Guided Needle Insertion: Preliminary Results in Phantom and Animal Experiments,” Radiology, Vol.285, No.2, pp. 454-461, 2017.
- [13] T. Hiraki, T. Matsuno, T. Kamegawa, T. Komaki, J. Sakurai, R. Matsuura, T. Yamaguchi, T. Sasaki, T. Iguchi, Y. Matsui, H. Gobara, and S. Kanazawa, “Robotic insertion of various ablation needles under computed tomography guidance: accuracy in animal experiments,” European J. of Radiology, Vol.105, pp. 162-167, 2018.
- [14] G. Bancon and B. Huber, “Depression and Grippers with Their Possible Applications,” 12th Int. Society for Inventory Research (ISIR), pp. 321-329, 1982.
- [15] E. Brown, N. Rodenberg, J. Amend, A. Mozeika, E. Steltz, M. R. Zakin, H. Lipson, and H. M. Jaeger, “Universal robotic gripper based on the jamming of granular material,” Proc. of the National Academy of Sciences of the United States of America (PNAS), Vol.107, No.44, pp. 11809-11814, 2010.
- [16] J. R. Amend, E. Brown, N. Rodenberg, H. M. Jaeger, and H. Lipson, “A Positive Pressure Universal Gripper Based on the Jamming of Granular Material,” IEEE Trans. on Robotics, Vol.28, No.2, pp. 341-350, 2012.
- [17] T. Nishida, D. Shigehisa, N. Kawashima, and K. Tadakuma, “Development of Universal Jamming Gripper with a Force Feedback Mechanism,” 7th Int. Conf. on Soft Computing and Intelligent Systems (SCIS) and 15th Int. Symp. on Advanced Intelligent Systems (ISIS), pp. 242-246, Kitakyushu, Japan, December 3-6, 2014.
- [18] M. Fujita, K. Tadakuma, E. Takane, T. Ichimura, H. Komatsu, A. Nomura, M. Konyo, and S. Tadokoro, “Variable inner volume mechanism for soft and robust gripping – Improvement of gripping performance for large-object gripping,” IEEE Int. Symp. on Safety, Security, and Rescue Robotics (SSRR), pp. 390-395, Lausanne, Switzerland, October 23-27, 2016.
- [19] K. Harada, K. Nagata, J. Rojas, I. G. Ramirez-Alpizar, W. Wan, H. Onda, and T. Tsuji, “Proposal of a shape adaptive gripper for robotic assembly tasks,” Advanced Robotics, Vol.30, Nos.17-18, pp. 1186-1198, 2016.
- [20] K. Mizushima, T. Oku, Y. Suzuki, T. Tsuji, and T. Watanabe, “Multi-Fingered Robotic Hand Based on Hybrid Mechanism of Tendon-Driven and Jamming Transition,” Proc. of the IEEE Int. Conf. on Soft Robotics (RoboSoft), pp. 376-381, Livorno, Italy, April 24-28, 2018.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.