Paper:
Safety Evaluation of Green Light Optimal Speed Advisory (GLOSA) System in Real-World Signalized Intersection
Hironori Suzuki* and Yoshitaka Marumo**
*Nippon Institute of Technology
4-1 Gakuendai, Miyashiro, Saitama 345-8501, Japan
**Nihon University
1-2-1 Izumicho, Narashino, Chiba 275-8575, Japan

The use of green light optimal speed advisory (GLOSA) systems is seen as a key application for achieving more environmentally friendly, time-efficient, and safer traffic flows at signalized intersections. In previous papers, the authors have proposed a GLOSA system that informs drivers of the most appropriate position for their vehicle instead of their optimal speed. This paper reports on a performance evaluation of our proposed GLOSA system after application to morning rush-hour traffic flow in a simulation of a real-world signalized intersection. A performance evaluation of this numerical simulation showed that our GLOSA system increased the time headway of vehicles and decreased their deceleration rates in the vicinity of the signalized intersection. In addition, the use of the system moderately increased fuel efficiency without affecting vehicle travel time. From these results, it can be concluded that our proposed GLOSA system has the potential to create safer traffic flows in real-world signalized intersections without degrading traffic efficiency.
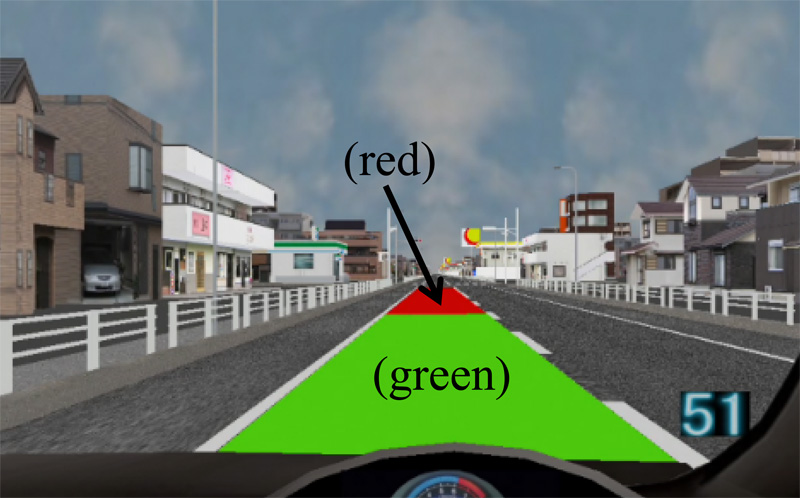
A vehicle travelling on the GO index
- [1] S. Kato, N. Hashimoto, T. Ogitsu, and S. Tsugawa, “Driver Assistance Systems with Communication to Traffic Lights – Configuration of Assistance Systems by Receiving and Transmission and Field Experiments –,” J. Robot. Mechatron., Vol.22, No.6, pp. 737-744, doi: 10.20965/jrm.2010.p0737, 2010.
- [2] D. Eckhoff, B. Halmos, and R. German, “Potentials and limitations of green light optimal speed advisory systems,” Proc. of 2013 IEEE Vehicular Networking Conf., pp. 103-110, 2013.
- [3] K. Katsaros, R. Kernchen, M. Dianati, and D. Rieck, “Performance study of a green light optimized speed advisory (GLOSA) application using an integrated cooperative ITS simulation platform,” Proc. of 2011 7th Int. Wireless Communications and Mobile Computing Conf., pp. 918-923, 2011.
- [4] V. Nguyen, O. T. T. Kim, T. N. Dang, S. I. Moon, and C. S. Hong, “An efficient and reliable green light optimal speed advisory system for autonomous cars,” Proc. of 2016 18th Asia-Pacific Network Operations and Management Symp. (APNOMS), pp. 1-4, 2016.
- [5] M. Seredynski, B. Dorronsoro, and D. Khadraoui, “Comparison of green light optimal speed advisory approaches,” Proc. of the 16th Int. IEEE Annual Conf. on Intelligent Transportation Systems (ITSC 2013), pp. 2187-2192, 2013.
- [6] M. Seredynski, W. Mazurczyk, and D. Khadraoui, “Multi-segment green light optimal speed advisory,” Proc. of 2013 IEEE 27th Int. Symp. on Parallel & Distributed Processing Workshops and Phd Forum, pp. 459-465, 2013.
- [7] R. Bodenheimer, A. Brauer, D. Eckhoff, and R. German, “Enabling GLOSA for adaptive traffic lights,” 2014 IEEE Vehicular Networking Conf. (VNC), pp. 167-174, 2014.
- [8] R. Bodenheimer, D. Eckhoff, and R. German, “GLOSA for adaptive traffic lights: methods and evaluation,” Proc. of 2015 7th Int. Workshop on Reliable Networks Design and Modeling (RNDM), pp. 320-328, 2015.
- [9] M. Seredynski, P. Ruiz, K. Szczypiorski, and D. Khadraoui, “Improving bus ride comfort using GLOSA-based dynamic speed optimization,” 2014 IEEE 28th Int. Parallel & Distributed Processing Symp. Workshops, pp. 457-463, 2014.
- [10] R. Stahlmann, A. Tomatis, R. German, and D. Eckhoff, “Multi-hop for GLOSA systems: evaluation andn results from a field experiment,” Proc. of 2017 IEEE Vehicular Networking Conf., pp. 175-178, 2017.
- [11] M. Treiber and A. Kesting, “Automatic and efficient driving strategies while approaching a traffic light,” 2014 IEEE 17th Int. Conf. on Intelligent Transportation Systems, pp. 1122-1128, 2014.
- [12] E. Kural, S. Jones, A. F. Parrilla, and A. Grauers, “Traffic light assistant system for optimized energy consumption in an electric vehicle,” 2014 Int. Conf. on Connected Vehicles and Expo (ICCVE), pp. 604-611, 2014.
- [13] A. Kesting, M. Treiber, M. Schonhof, and D. Helbing, “Adaptive cruise control design for active congestion avoidance,” Transportation Research Part C, Vol.16, pp. 668-683, 2008.
- [14] B. Liu and A. E. Kamel, “V2X-based decentralized cooperative adaptive cruise control in the vicinity of intersections,” IEEE Trans. on Intelligent Transportation Systems, Vol.17, No.3, pp. 644-658, 2016.
- [15] B. van Arem, C. J. G. van Driel, and R. Visseraaa, “The Impact of Cooperative Adaptive Cruise Control on Traffic-Flow Characteristics,” IEEE Trans. on Intelligent Transportation Systems, Vol.7, No.4, pp. 429-436, 2006.
- [16] H.-J. Günther, S. Kleinau, O. Trauer, and L. Wolf, “Platooning at traffic lights – a microscopic simulation study –,” Proc. of 2016 IEEE Intelligent Vehicles Symp. (IV), pp. 1047-1053, 2016.
- [17] B. Zhou, J. Cao, X. Zeng, and H. Wu, “Adaptive traffic light control in wireless sensor network-based intelligent transportation system,” Proc. of 2010 IEEE 72nd Vehicular Technology Conf., pp. 1-5, 2010.
- [18] M. Arafat, U. Mohammad, N. Al Holou, M. Tamer, and M. Abdul Hak, “Adaptive traffic light controlling methodology using connected vehicles concepts,” Proc. of the Int. Conf. on Information and Knowledge Engineering, pp. 1-7, 2012.
- [19] I. Iglesias, L. Isasi, M. Larburu, V. Martinez, and B. Molinete, “I2V communication driving assistance system: on-board traffic light assistant,” Proc. of IEEE 68th Vehicular Technology Conf., pp. 1-5, 2008.
- [20] T. A. Suramardhana and H.-Y. Jeong, “A driver-centric green light optimal speed advisory (DC-GLOSA) for improving road traffic congestion at urban intersections,” Proc. of 2014 IEEE Asia Pacific Conf. on Wireless and Mobile, pp. 304-309, 2014.
- [21] H. Suzuki and Y. Marumo, “A New Approach to Green Light Optimal Speed Advisory (GLOSA) Systems for High-Density Traffic Flow,” Proc. of the 21st IEEE Int. Conf. on Intelligent Transportation Systems, pp. 362-367, 2018.
- [22] H. Suzuki and Y. Marumo, “Evaluating Green Light Optimum Speed Advisory (GLOSA) System in Traffic Flow with Information Distance Variations,” Proc. of the 1st Int. Conf. on Human Interaction and Emerging Technologies (IHIET 2019), pp. 502-508, doi: 10.1007/978-3-030-25629-6_78, 2019.
- [23] H. Suzuki and Y. Marumo, “Green Light Optimum Speed Advisory (GLOSA) System with Signal Timing Variations – Traffic Simulation Study –,” Proc. of the 2nd Int. Conf. on Human Systems Engineering and Design (IHSED2019): Future Trends and Applications, pp. 584-590, doi: 10.1007/978-3-030-27928-8_89, 2019.
- [24] Y. Marumo, K. Yamazaki, H. Suzuki, and Y. Michitsuji, “Driver Assistance System at Signalized Intersection by Indicating Predicted Signal Aspects on Road,” Proc. of the 5th Int. Symp. on Future Active Safety Technology toward Zero accidents (FAST-zero ’19), pp. 1-4, 2019.
- [25] R. Matsumi, P. Raksincharoensak, and M. Nagai, “Development of Autonomous Intelligent Driving System to Enhance Safe and Secured Traffic Society for Elderly Drivers – Autonomous Collision Avoidance System with Hazard Anticipation Driver Characteristics –,” J. Robot. Mechatron., Vol.25, No.6, pp. 966-972, doi: 10.20965/jrm.2013.p0966, 2013.
- [26] P. Raksincharoensak, Y. Akamatsu, K. Moro, and M. Nagai, “Driver Speed Control Modeling for Predictive Braking Assistance System Based on Risk Potential in Intersections,” J. Robot. Mechatron., Vol.26, No.5, pp. 628-637, doi: 10.20965/jrm.2014.p0628, 2014.
- [27] Y. Marumo, H. Suzuki, and T. Katayama, “Traffic Flow Characteristics When Giving Right-of-Way to Right Turn Vehicle,” Trans. of the Society of Instrument and Control Engineers, Vol.48, No.10, pp. 614-621, doi: 10.9746/sicetr.48.614, 2012 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.