Paper:
Path Planning Design for Boarding-Type Personal Mobility Unit Passing Pedestrians Based on Pedestrian Behavior
Hidehisa Yoshida, Kohei Yoshida, and Toyoyuki Honjo
National Defense Academy of Japan
1-10-20 Hashirimizu, Yokosuka, Kanagawa 239-8686, Japan

In this study, we consider a scenario in which a boarding-type personal mobility (BPM) unit navigates in a mixed environment with pedestrians. The BPM unit passenger is expected to pass pedestrians in a smooth manner without imparting anxiety to them. This is accomplished by selecting appropriate paths on a successively updated map of the surrounding environment. Based on a model that simulates a pedestrian’s path selection behavior, we design and investigate a path selection method that avoids sudden behavior changes in the BPM unit, which may cause apprehensiveness to the passenger.
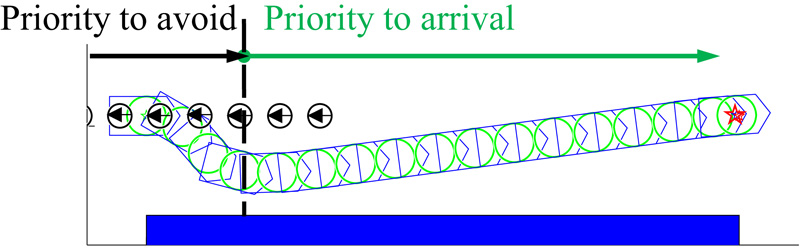
Cost proposal using switching strategy
- [1] A. Ravankar, A. A. Ravankar, Y. Kobayashi, Y. Hoshino, and C.-C. Peng, “Path smoothing techniques in robot navigation: State-of-the-art, current and future challenges,” Sensors, Vol.18, Issue 9, 3170, 2018.
- [2] M. Yokozuka and O. Matsumoto, “A Reasonable Path Planning via Path Energy Minimization,” J. Robot. Mechatron., Vol.26, No.2, pp. 236-244, 2014.
- [3] A. Farid and T. Matsumaru, “Path Planning in Outdoor Pedestrian Settings Using 2D Digital Maps,” J. Robot. Mechatron., Vol.31, No.3, pp. 464-473, 2019.
- [4] Y. Hosoda, K. Yamamoto, R. Ichinose, S. Egawa, J. Tamamoto, and T. Tsubouchi, “Collision avoidance control of human-symbiotic robot,” Trans. Japan Society of Mechanical Engineers Series C, Vol.77, No.775, pp. 1051-1061, 2011 (in Japanese).
- [5] Y. Hara, A. Oshima, Y. Ono, A. Amino, and K. Yamamoto, “Development of autonomous navigation technology adapted to crowded pedestrian streets and evaluations in real world using experimental robot Sofara-T,” J. of the Robotics Society of Japan, Vol.30, No.3, pp. 287-295, 2012 (in Japanese).
- [6] K. Yamamoto, “Personal-carrier mobility-support robot for autonomous navigation on pedestrian space,” J. of the Robotics Society of Japan, Vol.33, No.8, pp. 577-582, 2015 (in Japanese).
- [7] J. Lambert, L. Liang, L. Morales, N. Akai, A. Carballo, E. Takeuchi, P. Narksri, S. Seiya, and K. Takeda, “Tsukuba Challenge 2017 Dynamic Object Tracks Dataset for Pedestrian Behavior Analysis,” J. Robot. Mechatron., Vol.30, No.4, pp. 598-612, 2018.
- [8] K. Ezawa, P. Raksincharoensak, and M. Nagai, “Hazard anticipatory autonomous braking control system based on 2-D pedestrian motion prediction,” J. Robot. Mechatron., Vol.27, No.6, pp. 636-644, 2016.
- [9] T. Tomizawa and Y. Shibata, “Oncoming human avoidance for autonomous mobile robot based on gait characteristics,” J. Robot. Mechatron., Vol.28, No.4, pp. 500-507, 2016.
- [10] M. Mikawa, J. Lyu, M. Fujisawa, W. Hiiragi, and T. Ishibashi, “Previous announcement method using 3D CG face interface for mobile robot,” J. Robot. Mechatron., Vol.32, No.1, pp. 97-112, 2020.
- [11] D. Helbing and P. Molnár, “Social force model for pedestrian dynamics,” Physical Review E, Vol.51, pp. 4282-4286, 1995.
- [12] M. Aasno, M. Kuwahara, and S. Tanaka, “Microscopic pedestrian behavior model in congested conditions,” Proc. 5th ITS Symp. 2006, OS6-4, pp. 419-424, 2006 (in Japanese).
- [13] K. Yoshida, H. Yoshida, and T. Honjo, “Consideration for avoidance space where pedestrian behavior is considered,” Proc. of Mechanical Engineering Congress 2018 Japan (MECJ-18), J1810205, 2018 (in Japanese).
- [14] R. Ohno, I. Kaneko, and M. Kobayashi, “Measurement of pedestrian’s evasive behavior around a person walking with a trolly bag or baby stroller by quasi-experiment in an actual setting,” AIJ J. Technol. Des., Vol.21, No.47, pp. 265-268, 2015 (in Japanese).
- [15] C.-H. Liu, Y. Ooeda, and T. Sumi, “A Model for Pedesterian Movement With Obstacle Evasion Using Personal Space Concept,” J. of Japan Society of Civil Engineers, Vol.64, No.4, pp. 513-524, 2008 (in Japanese).
- [16] C. Nakagawa, K. Nakano, T. Kosaka, Y. Suda, Y. Kawarasaki, and Y. Kosaka, “Evaluation experiments on the affinity between pedestrians and personal mobility vehicles using personal space,” Trans. Japan Society of Mechanical Engineers, C, Vol.76, No.77, pp. 2493-2499, 2010 (in Japanese).
- [17] T. Matsubara, M. Usuki, K. Sugiyama, and K. Nishimoto, “Raison D’ être object: a cyber-hearth that catalyzes face-to-face informal communication,” J. of Information Processing Society of Japan, Vol.44, No.12, pp. 3174-3187, 2003 (in Japanese).
- [18] N. Momose and T. Oshima, “An Improvement on the Riding Comfort of Electrically Powered Wheelchair by Controlling of the Body Pitching,” J. of the Society of Biomechanisms, Vol.31, No.1, pp. 36-44, 2007 (in Japanese).
- [19] Y. Suzuki, S. Thompson, and S. Kagami, “Smooth path planning with pedestrian avoidance for wheeled robots,” J. Robot. Mechatron., Vol.22, No.1, pp. 21-27, 2010.
- [20] K. Ezawa, P. Raksincharoensak, Y. Akagi, K. Maeda, and T. Kojima, “Study on autonomous braking control system based on motion prediction,” Trans. Japan Society of Mechanical Engineers, Vol.84, No.865, p. 17-00557, 2018 (in Japanese).
- [21] M. T. Wolf and J. W. Burdick, “Artificial potential functions for highway driving with collision avoidance,” Proc. of IEEE Int. Conf. on Robotics and Automation (ICRA 2008), pp. 3731-3736, 2008.
- [22] R. Matsumi, P. Raksincharoensak, and M. Nagai, “Study on Autonomous Intelligent Drive System Based on Potential Field with Hazard Anticipation,” J. Robot. Mechatron., Vol.27, No.1, pp. 5-11, 2015.
- [23] N. Tiemann, W. Branz, and D. H. Schramm, “Predictive pedestrian protection – situation analysis with a pedestrian motion model,” Proc. 10th Int. Symp. on Advanced Vehicle Control (AVEC 10), pp. 783-788, 2010.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.