Paper:
Autonomous Motion Planning in Pedestrian Space Considering Passenger Comfort
Hiroshi Yoshitake, Kenta Nishi, and Motoki Shino
Graduate School of Frontier Sciences, The University of Tokyo
5-1-5 Kashiwanoha, Kashiwa, Chiba 277-8563, Japan

In this study, we proposed an autonomous motion planning method for improving passenger comfort while ensuring safety, particularly with respect to mobility scooters used by elderly people. We proposed a trajectory planner for restricting vehicle behaviors with large accelerations and jerks by selecting a safe trajectory from a set of preset trajectories. Then, based on this trajectory planner, we developed an autonomous motion planning method with four different driving modes, and evaluated the effectiveness of the method through a numerical simulation. The simulation results demonstrated that the proposed method increased comfort without compromising on safety.
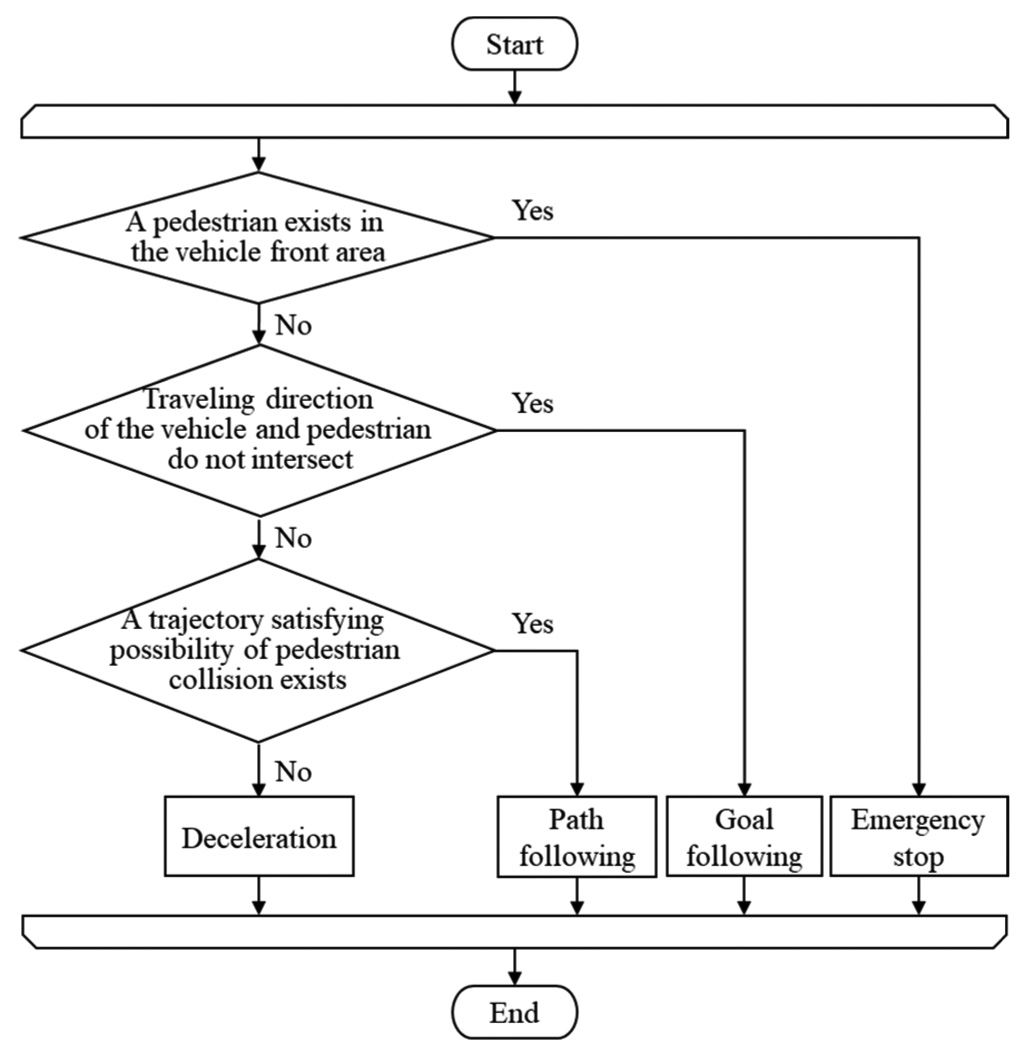
Flowchart of proposed planning method
- [1] A. Brandt, S. Iwarsson, and A. Stahle, “Older People’s Use of Powered Wheelchairs for Activity and Participation,” J. of Rehabilitation Medicine, Vol.36, No.2, pp. 70-77, 2004.
- [2] J. Okuno, T. Nishijima, and S. Kuno, “The Relationship between Physical Fitness and Index of Competence and General Health Questionnaire in the Housebound Elderly,” Japanese J. of Physical Fitness and Sports Medicine, Vol.52, No.Supplement, pp. 237-247, 2003 (in Japanese).
- [3] D. Fox, W. Burgard, and S. Thrun, “The Dynamic Window Approach to Collision Avoidance,” IEEE Robotics & Automation Magazine, Vol.4, No.1, pp. 23-33, 1997.
- [4] M. Seder and I. Petrovic, “Dynamic Window Based Approach to Mobile Robot Motion Control in the Presence of Moving Obstacles,” Proc. of 2007 IEEE Int. Conf. on Robotics and Automation, pp. 1986-1991, 2007.
- [5] B. Damas and J. Santos-Victor, “Avoiding Moving Obstacles: The Forbidden Velocity Map,” Proc. of 2009 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4393-4398, 2009.
- [6] M. Guan, C. Wen, Z. Wei, C. L. Ng, and Y. Zou, “A Dynamic Window Approach with Collision Suppression Cone for Avoidance of Moving Obstacles,” Proc. of 2018 IEEE 16th Int. Conf. on Industrial Informatics, pp. 337-342, 2018.
- [7] P. Fiorini and Z. Shiller, “Motion Planning in Dynamic Environments Using Velocity Obstacles,” The Int. J. of Robotics Research, Vol.17, No.7, pp. 760-772, 1998.
- [8] P. Fiorini and Z. Shiller, “Motion Planning in Dynamic Environments Using the Relative Velocity Paradigm,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 560-565, 1993.
- [9] A. Cosgun, E. A. Sisbot, and H. I. Christensen, “Anticipatory Robot Path Planning in Human Environments,” Proc. of 2016 25th IEEE Int. Symp. on Robot and Human Interactive Communication, pp. 562-569, 2016.
- [10] B. Kim and J. Pineau, “Socially Adaptive Path Planning in Human Environments Using Inverse Reinforcement Learning,” Int. J. of Social Robotics, Vol.8, No.1, pp. 51-66, 2016.
- [11] S. Gulati, C. Jhurani, B. Kuipers, and R. Longoria, “A Framework for Planning Comfortable and Customizable Motion of an Assistive Mobile Robot,” Proc. of 2009 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4253-4260, 2009.
- [12] P. Bevilacqua, M. Frego, E. Bertolazzi, D. Fontanelli, L. Palopoli, and F. Biral, “Path Planning Maximising Human Comfort for Assistive Robots,” Proc. of 2016 IEEE Conf. on Control Applications, pp. 1421-1427, 2016.
- [13] Y. Morales, N. Kallakuri, K. Shinozawa, T. Miyashita, and N. Hagita, “Human-Comfortable Navigation for an Autonomous Robotic Wheelchair,” Proc. of 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2737-2743, 2013.
- [14] Y. Morales, A. Watanabe, F. Ferreri, J. Even, T. Ikeda, K. Shinozawa, T. Miyashita, and N. Hagita, “Including Human Factors for Planning Comfortable Paths,” Proc. of 2015 IEEE Int. Conf. on Robotics and Automation, pp. 6153-6159, 2015.
- [15] Y. Morales, T. Miyashita, and N. Hagita, “Social Robotic Wheelchair Centered on Passenger and Pedestrian Comfort,” Robotics and Autonomous Systems, Vol.87, pp. 355-362, 2017.
- [16] S. Maeda, “Trends of Vehicle Vibration Evaluation According to the ISO2631 Standard,” The J. of the Acoustical Society of Japan, Vol.53, No.1, pp. 33-38, 1997 (in Japanese).
- [17] JIS B 7760-2, “Whole body vibration – Part 2: Basic requirements for measurement methods and evaluations,” 2004 (in Japanese).
- [18] Y. Suzuki, S. Thompson, and S. Kagami, “Smooth Path Planning with Pedestrian Avoidance for Wheeled Robots,” J. Robot. Mechatron., Vol.22, No.1, pp. 21-27, 2010.
- [19] T. M. Howard and A. Kelly, “Optimal Rough Terrain Trajectory Generation for Wheeled Mobile Robots,” The Int. J. of Robotics Research, Vol.26, No.2, pp. 141-166, 2007.
- [20] A. Johansson, D. Helbing, and P. K. Shukla, “Specification of the Social Force Pedestrian Model by Evolutionary Adjustment to Video Tracking Data,” Advances in Complex Systems, Vol.10, No.Supp02, pp. 271-288, 2007.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.