Paper:
A MEMS Tactile Sensor with Fingerprint-Like Array of Contactors for High Resolution Visualization of Surface Distribution of Tactile Information
Kazuki Watatani, Kyohei Terao, Fusao Shimokawa, and Hidekuni Takao
Faculty of Engineering and Design, Kagawa University
2217-20 Hayashi-cho, Takamatsu-shi, Kagawa 761-0396, Japan

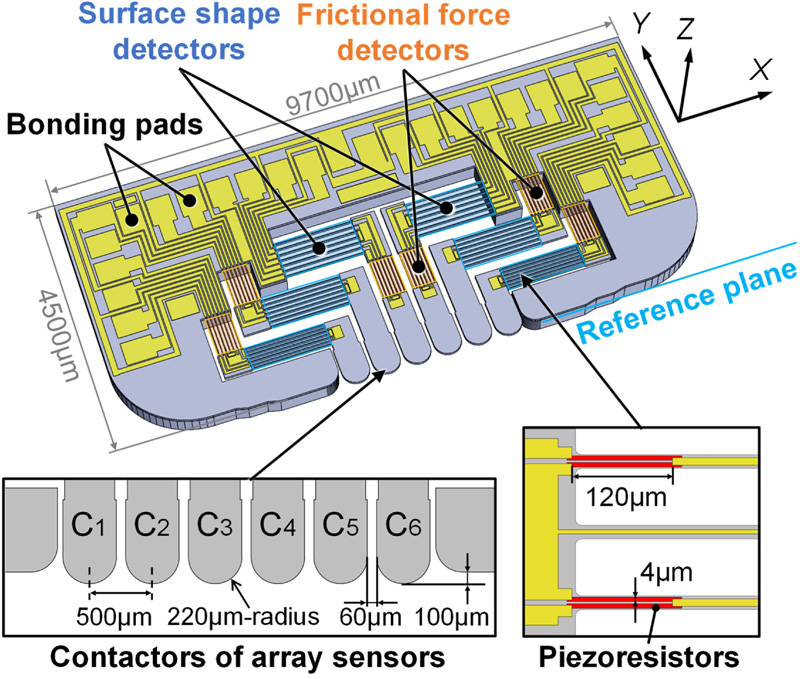
In the present report, we have developed a tactile sensor with fingerprint-like array of contactors for obtaining the surface distribution of tactile information in high spatial resolutions. Six high resolution sensing modules of contactors with biaxial detectors were integrated in line at a pitch of 500 μm, the typical pitch of fingerprint ridges. Each sensing module independently detected the micro surface shape and locally generated frictional force on the object surfaces. Mechanical analysis of the fabricated sensors showed good sensitivities and highly linear responses. Consequently, the measured detection resolutions of surface shape and frictional force were 0.17 μm and 9.9 μN, respectively. The experimental performance evaluation of fabricated sensor was measured in the distribution of tactile information by sweeping the sensor with a yaw angle. Additionally, the 3D surface shape of weave structure and surface distribution of frictional force in a woven fabric with 0.4 mm pitch of threads in high spatial resolution was clearly visualized/observed. Moreover, the directionality of tactile information of the fabric surface distribution was successfully realized using the tactile sensor with the array of contactors by sweeping in different directions.
Tactile sensor with array of contactors
- [1] K. H. Andres and M. Düring, “Morphology of cutaneous receptors,” A. Iggo (Ed.), “Handbook of Sensory Physiology Somatosensory System,” Vol.2, pp. 3-28, Springer, 1973.
- [2] R. S. Johansson and A. B. Vallbo, “Tactile sensory coding in the glabrous skin of the human hand,” Trends in Neurosciences, Vol.6, pp. 27-32, 1983.
- [3] R. S. Dahiya, G. Metta, M. Valle, and G. Sandini, “Tactile sensing – from humans to humanoids,” IEEE Trans. on Robotics, Vol.26, pp. 1-20, 2010.
- [4] C. Chi, X. Sun, N. Xue, T. Li, and C. Liu, “Recent Progress in Technologies for Tactile Sensors,” Sensors (Basel), Vol.18, No.4, 2018.
- [5] R. H. Lamotte and M. A. Srinivasan, “Surface microgeometry: tactile perception and neural encoding,” O Franzén and J. Westman (Eds.), Information Processing in the Somatosensory System, pp. 49-58, 1991.
- [6] M. Hollins and S. R. Risner, “Evidence for the duplex theory of tactile texture perception,” Perception & Psychophysics, Vol.62, No.4, pp. 695-705, 2000.
- [7] H. Yousef, M. Boukallel, and K. Althoefer, “Tactile sensing for dexterous in-hand manipulation in robotics – A review,” Sensors and Actuators A: Physical, Vol.167, No.2, pp. 171-187, 2011.
- [8] P. S. Girão, P. M. P. Ramos, O. Postolache, and J. M. D. Pereira, “Tactile sensors for robotic applications,” Measurement, Vol.46, No.3, pp. 1257-1271, 2013.
- [9] R. Kikuuwe, K. Nakamura, and M. Yamamoto, “Finger-Mounted Tactile Sensor for Evaluating Surfaces,” J. Robot. Mechatron., Vol.24, No.3, pp. 430-440, 2012.
- [10] M. E. H. Eltaib and J. R. Hewit, “Tactile sensing technology for minimal access surgery – a review,” Mechatronics, Vol.13, No.10, pp. 1163-1177, 2003.
- [11] J. Engel, J. Chen, Z. Fan, and C. Liu, “Polymer micromachined multimodal tactile sensors,” Sensors and Actuators A: Physical, Vol.117, No.1, pp. 50-61, 2005.
- [12] J.-S. Heo, J.-H. Chung, and J.-J. Lee, “Tactile sensor arrays using fiber Bragg grating sensors,” Sensors and Actuators A: Physical, Vol.126, No.2, pp. 312-327, 2006.
- [13] J.-C. Lee and D.-W. Lee, “Flexible and tactile sensor based on a photosensitive polymer,” Microelectronic Engineering, Vol.87, Nos.5-8, pp. 1400-1403, 2010.
- [14] H. Kim, S. Lee, and K.-S. Yun, “Capacitive tactile sensor array for touch screen application,” Sensors and Actuators A: Physical, Vol.165, No.1, pp. 2-7, 2011.
- [15] M.-Y. Cheng, C.-M. Tsao, Y.-Z. Lai, and Y.-J. Yang, “The development of a highly twistable tactile sensing array with stretchable helical electrodes,” Sensors and Actuators A: Physical, Vol.166, No.2, pp. 226-233, 2011.
- [16] J. Park, Y. Lee, J. Hong, Y. Lee, M. Ha, Y. Jung, H. Lim, S. Y. Kim, and H. Ko, “Tactile-direction-sensitive and stretchable electronic skins based on human-skin-inspired interlocked microstructures,” ACS nano, Vol.8, No.12, pp. 12020-12029, 2014.
- [17] Q. Guo, C. Mastrangelo, and D. Young, “High performance MEMS tactile sensor array with robustness and fabrication simplicity,” 2016 IEEE 29th Int. Conf. on Micro Electro Mechanical System (MEMS), pp. 877-880, Shanghai, China, 2016.
- [18] Y. Wang, K. Xi, D. Mei, G. Liang, and Z. Chen, “A Flexible Tactile Sensor Array Based on Pressure Conductive Rubber for Contact Force Measurement and Slip Detection,” J. Robot. Mechatron., Vol.28, No.3, pp. 378-385, 2016.
- [19] X. Sun, S. Zheng, C. Wang, J. Sun, J. Chen. T. Li, C. Liu, and N. Xue, “Development of a flexible tactile sensor array for three-dimensional force detection with high sensitivity,” 2019 20th Int. Conf. on Solid-State Sensors, Actuators and Microsystems & Eurosensors XXXIII (Transducers & Eurosensors XXXIII), pp. 2476-2479, Berlin, Germany, 2019.
- [20] M. Sohgawa, D. Hirashima, Y. Moriguchi, T. Uematsu, W. Mito, T. Kanashima, M. Okuyama, and H. Noma, “Tactile sensor array using microcantilever with nickel-chromium alloy thin film of low temperature coefficient of resistance and its application to slippage detection,” Sensors and Actuators A: Physical, Vol.186, pp. 32-37, 2012.
- [21] H. Takahashi, A. Nakai, N. Thanh-Vinh, K. Matsumoto, and I. Shimoyama, “A triaxial tactile sensor without crosstalk using pairs of piezoresistive beams with sidewall doping,” Sensors and Actuators A: Physical, Vol.199, pp. 43-48, 2013.
- [22] N. Thanh-Vinh, N. Binh-Khiem, H. Takahashi, K. Matsumoto, and I. Shimoyama, “High-sensitivity triaxial tactile sensor with elastic microstructures pressing on piezoresistive cantilevers,” Sensors and Actuators A: Physical, Vol.215, pp. 167-175, 2014.
- [23] S. Asano, M. Muroyama, T. Bartley, T. Kojima, T. Nakayama, U. Yamaguchi, H. Yamada, Y. Nonomura, Y. Hata, H. Funabashi, and S. Tanaka, “Surface-mountable capacitive tactile sensors with flipped CMOS-diaphragm on a flexible and stretchable bus line,” Sensors and Actuators A: Physical, Vol.240, pp. 167-176, 2016.
- [24] A. Nakai, K. Kuwana, K. Saito, T. Dohi, A. Kunagai, and I. Shimoyama, “MEMS 6-axis force-torque sensor attached to the tip of grasping forceps for identification of tumor in thoracoscopic surgery,” 2017 IEEE 30th Int. Conf. on Micro Electro Mechanical System (MEMS), pp. 546-548, Las Vegas, USA, 2017.
- [25] Y. Hata, Y. Suzuki, M. Muroyama, T. Nakayama, Y. Nonomura, R. Chand, H. Hirano, Y. Omura, M. Fujiyoshi, and S. Tanaka, “Integrated 3-axis tactile sensor using quad-seesaw-electrode structure on platform LSI with through silicon vias,” Sensors and Actuators A: Physical, Vol.273, pp. 30-41, 2018.
- [26] S.-K. Yeh and W. Fang, “Integration of stainless-steel tactile bump with inductive tactile sensor array for 3D micro joystick button application,” 2019 20th Int. Conf. on Solid-State Sensors, Actuators and Microsystems & Eurosensors XXXIII (Transducers & Eurosensors XXXIII), pp. 1882-1885, Berlin, Germany, 2019.
- [27] K. Watatani, K. Terao, F. Shimokawa, and H. Takao, “Planar-type MEMS tactile sensor integrating micro-macro detection function of fingertip to evaluate surface touch sensation,” Japanese J. of Applied Physics, Vol.58, 097002, 2019.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.