Paper:
Tactile Sensor with High-Density Microcantilever and Multiple PDMS Bumps for Contact Detection
Tomoya Fujihashi, Fumitoshi Suga, Ryoma Araki, Jyun Kido, Takashi Abe, and Masayuki Sohgawa
Niigata University
8050 Ikarashi 2-no-cho, Nishi-ku, Niigata 950-2181, Japan

In the study, we investigated a detection method of partial contact of an object owing to curved or uneven surface of the contact object by a tactile sensor. The sensor is developed using three microcantilevers embedded in a polydimethylsiloxane (PDMS) bump. First, three bumps were employed to place a bump for each cantilever. It was possible to detect a contact position because the resistance change in the strain gauge on the cantilever under each bump significantly depended on the contact/non-contact state of each bump. Second, a tactile sensor with high-density arrangement of microcantilevers was used to detect partial or tilted contact situations. The results indicated that the output of a tactile sensor with high-density arrangement of microcantilevers reflected partial or tilted contact. It is suggested that a tactile sensor with multiple bumps and high-density microcantilevers allows for more dexterous gripping control based on the shape of the object and contact angle.
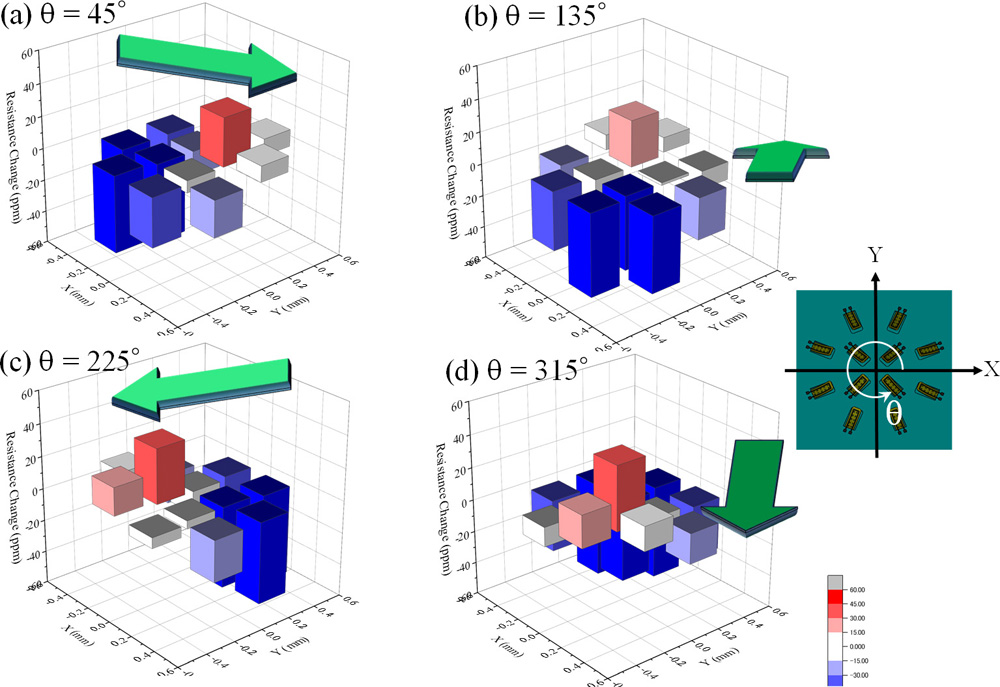
Detection of partial contact with tilting
- [1] R. S. Dahiya, G. Metta, M. Valle, and G. Sandini, “Tactile Sensing – From Humans to Humanoids,” IEEE Trans. Robot., Vol.26, No.1, pp. 1-20, doi:10.1109/TRO.2009.2033627, 2010.
- [2] Z. Kappassov, J.-A. Corrales, and V. Perdereau, “Tactile sensing in dexterous robot hands – Review,” Rob. Auton. Syst., Vol.74, pp. 195-220, doi:10.1016/j.robot.2015.07.015, 2015.
- [3] H. Yousef, M. Boukallel, and K. Althoefer, “Tactile sensing for dexterous in-hand manipulation in robotics – A review,” Sens. Actuators, A Phys., Vol.167, No.2, pp. 171-187, doi:10.1016/j.sna.2011.02.038, 2011.
- [4] D. Yamada, T. Maeno, and Y. Yamada, “Artificial finger skin having ridges and distributed tactile sensors used for grasp force control,” J. Robot. Mechatron., Vol.14, No.2, pp. 140-146, doi:10.20965/jrm.2002.p0140, 2002.
- [5] S. Teshigawara, T. Tsutsumi, Y. Suzuki, and M. Shimojo, “High speed and high sensitivity slip sensor for dexterous grasping,” J. Robot. Mechatron., Vol.24, No.2, pp. 298-310, doi:10.20965/jrm.2012.p0298, 2012.
- [6] Y. Mizoguchi, K. Tadakuma, H. Hasegawa, A. Ming, M. Ishikawa, and M. Shimojo, “Development of Intelligent Robot Hand Using Proximity, Contact and Slip Sensing,” Trans. Soc. Instrum. Control Eng., Vol.46, No.10, pp. 632-640, doi:10.9746/sicetr.46.632, 2010 (in Japanese).
- [7] M. Sohgawa, T. Mima, H. Onishi, T. Kanashima, M. Okuyama, K. Yamashita, M. Noda, M. Higuchi, and H. Noma, “Tactile array sensor with inclined chromium/silicon piezoresistive cantilevers embedded in elastomer,” Proc. of Transducers 2009, pp. 284-287, doi:10.1109/SENSOR.2009.5285509, 2009.
- [8] H. Tachibana, S. Kamanaru, T. Mima, M. Sohgawa, T. Kanashima, K. Yamashita, M. Noda, M. Okuyama, H. Noma, and M. Higuchi, “Fabrication and Basic Characteristics of Multiaxial Tactile Sensor with 3 Cantilevers,” IEEJ Trans. Sens. Micromachines, Vol.130, No.6, pp. 223-229, doi:10.1541/ieejsmas.130.223, 2010 (in Japanese).
- [9] M. Sohgawa, T. Uematsu, W. Mito, T. Kanashima, M. Okuyama, and H. Noma, “Crosstalk Reduction of Tactile Sensor Array with Projected Cylindrical Elastomer over Sensing Element,” Jpn. J. Appl. Phys., Vol.50, No.6, 06GM08, doi:10.1143/JJAP.50.06GM08, 2011.
- [10] D. Hirashima, T. Uematsu, M. Sohgawa, W. Mito, T. Kanashima, M. Okuyama, and H. Noma, “Fabrication of a Flexible Array for Tactile Sensors with Microcantilevers and the Measurement of the Distribution of Normal and Shear Forces,” Jpn. J. Appl. Phys., Vol.50, No.6, 06GM02, doi:10.1143/JJAP.50.06GM02, 2011.
- [11] M. Sohgawa, D. Hirashima, Y. Moriguchi, T. Uematsu, W. Mito, T. Kanashima, M. Okuyama, and H. Noma, “Tactile sensor array using microcantilever with nickel-chromium alloy thin film of low temperature coefficient of resistance and its application to slippage detection,” Sens. Actuators A, Vol.186, pp. 32-37, doi:10.1016/j.sna.2011.12.055, 2012.
- [12] H. Yokoyama, M. Sohgawa, T. Kanashima, T. Azuma, M. Okuyama, and H. Noma, “Fabrication and Noise Reduction of the Miniature Tactile Sensor Using Through-Silicon-Via Connection with Signal Amplifier,” Jpn. J. Appl. Phys., Vol.52, No.6S, 06GL08, doi:10.7567/JJAP.52.06GL08, 2013.
- [13] H. Yokoyama, T. Kanashima, M. Okuyama, T. Abe, H. Noma, T. Azuma, and M. Sohgawa, “Proximity and Tactile Sensing Using a Single MEMS Sensor with Photo- and Strain Sensitivities,” IEEJ Trans. Sens. Micromachines, Vol.134, No.7, pp. 229-234, doi:10.1541/ieejsmas.134.229, 2014 (in Japanese).
- [14] M. Sohgawa, A. Nozawa, H. Yokoyama, T. Kanashima, M. Okuyama, T. Abe, H. Noma, and M. Sohgawa, “Multimodal measurement of proximity and touch force by light- and strain-sensitive multifunctional MEMS sensor,” Proc. of IEEE SENSORS 2014, pp. 1749-1752, doi:10.1109/ICSENS.2014.6985362, November 2014.
- [15] K. Takahashi, T. Abe, M. Okuyama, H. Noma, and M. Sohgawa, “Surface Texture Characterization Using Optical and Tactile Combined Sensor,” Sens. Mater., Vol.30, No.5, pp. 1091-1101, doi:10.18494/SAM.2018.1786, 2018.
- [16] R. Araki, F. Suga, T. Abe, H. Noma, and M. Sohgawa, “Gripping control of delicate and flexible object by electromotive manipulator with proximity and tactile combo MEMS sensor,” Proc. of Transducers 2017, pp. 1140-1143, doi:10.1109/TRANSDUCERS.2017.7994254, June 2017.
- [17] R. Araki, T. Abe, H. Noma, and M. Sohgawa, “Electromotive Manipulator Control by Detection of Proximity, Contact, and Slipping Using MEMS Multiaxial Tactile Sensor,” Electr. Eng. Japan, Vol.204, No.2, pp. 44-49, doi:10.1002/eej.23098, 2018.
- [18] R. Araki, T. Abe, H. Noma, and M. Sohgawa, “Miniaturization and high-density arrangement of microcantilevers in proximity and tactile sensor for dexterous gripping control,” Micromachines, Vol.9, No.6, 301, doi:10.3390/mi9060301, 2018.
- [19] F. Suga, R. Araki, T. Abe, H. Noma, and M. Sohgawa, “Suppression of Deformation for Gripping Soft Objects Using Miniature Tactile Sensor with Hemisphere PDMS,” Proc. of Asia-Pacific Conf. Transducers and Micro-Nano Tech. 2018, 123, June 2018.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.