Paper:
Development of Assist Suit for Squat Lifting Support Considering Gait and Quantitative Evaluation by Three-Dimensional Motion Analysis
Masashi Kashima*, Hirokazu Arakawa*, Seigo Kimura*, Rie Nishihama*, Kazuya Yokoyama**, Isao Kikutani**, and Taro Nakamura*
*Department of Precision Mechanics, Faculty of Science and Engineering, Chuo University
1-13-27 Kasuga, Bunkyo-ku, Tokyo 112-8551, Japan
**Nabtesco Corporation
2-7-9 Hirakawacho, Chiyoda-ku, Tokyo 102-0093, Japan

Globally, lower back pain is a serious problem. For workers, it not only causes health problems but also has social and economic influences. Lower back pain could be attributed to burden on people’s waists when they handle heavy objects. Ministry of Health, Labour and Welfare in Japan recommends squat lifting, a method of lifting objects with a smaller burden on waist. On the other hand, squat lifting is not commonly used because it requires deep bending of knees to lift an object, leading to a larger work load. Therefore, a leaf-spring type power assist suit for legs has been developed in order to assist squat lifting. However, if the fixing performance of a preceding machine was enhanced, a leaf spring could impede the bending of knee joints during gait motion. In the present study, we developed a power assist suit for legs using a slide mechanism. A leaf spring was chosen so as to meet a target assist torque determined by a motion analysis for lifting objects. In addition, we made a prototype machine with slide mechanism. EMG measurement of the thigh muscle during lifting actions using the prototype machine showed a decrease of up to 46%. It was also confirmed that a machine with slide mechanism could realize a more natural gait than a machine without it.
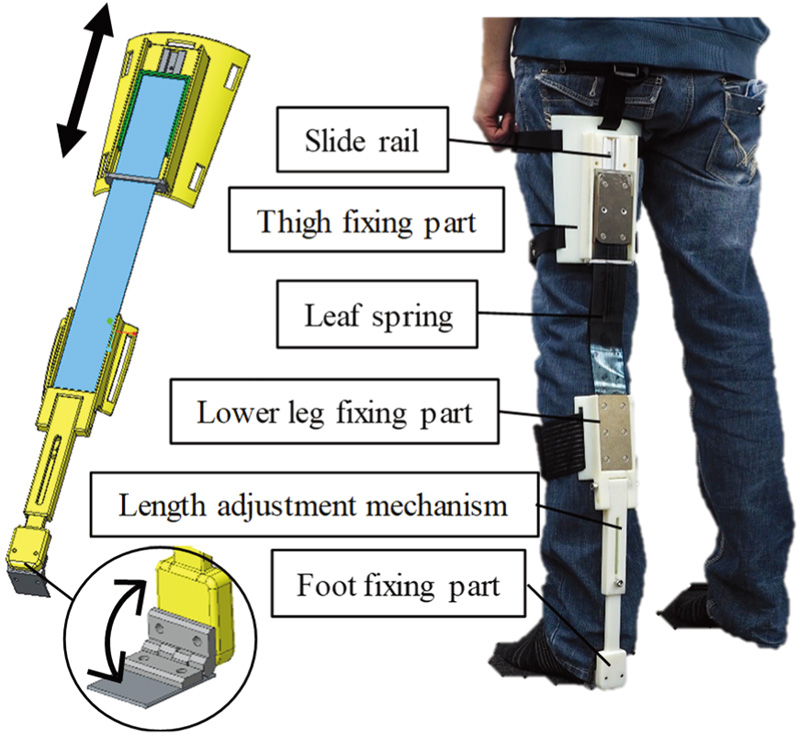
Leaf spring assist suit considering gait
- [1] D. A. Neuman, “Kinesiology of the Muscloskeletal System,” Mosby, 2006.
- [2] H. Arakawa, S. Mohri, Y. Yamada, K. Yokoyama, I. Kikutani, and T. Nakamura, “Proposal of Non-Rotating Joint Drive Type Power Assist Suit for Lower Limbs Considering Squat Lifting,” J. Robot. Mechatron., Vol.30, No.5, pp. 752-761, 2018.
- [3] Y. Saito, K. Kikuchi, H. Negoto, T. Oshima, and T. Haneyoshi, “Development of externally powered lower limb orthosis with bilateral-servo actuator,” Proc. of 9th Int. Conf. on Rehabilitation Robotics, 2005 (ICORR 2005), pp. 394-399, 2005.
- [4] T. Kawabata, H. Satoh, and Y. Sankai, “Working posture control of robot suit HAL for reducing structural stress,” Proc. of 2009 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO), pp. 2013-2018, 2009.
- [5] A. B. Zoss, H. Kazerooni, and A. Chu, “Biomechanical design of the Berkeley lower extremity exoskeleton (BLEEX),” IEEE/ASME Trans. on mechatronics, Vol.11, No.2, pp. 128-138, 2006.
- [6] N. Mir-Nasiri and H.S. Jo, “Autonomous low limb exoskeleton to suppress the body weight,” Proc. of 2017 3rd Int. Conf. on Control, Automation and Robotics (ICCAR), pp. 47-51, 2017.
- [7] E. Nakamura, K. Ichinose, and H. Kobayashi, “Development and evaluation of muscle suit for arms and lower back support,” Proc. of 2017 17th Int. Conf. on Control, Automation and Systems (ICCAS), pp. 1462-1465, 2017.
- [8] Y. Naruoka, N. Hiramitsu, and Y. Mitsuya, “A Study of Power-Assist Technology to Reduce Body Burden During Loading and Unloading Operations by Support of Knee Joint Motion,” J. Robot. Mechatron., Vol.28, No.6, pp. 949-957, 2016.
- [9] Y. Imamura, T. Tanaka, Y. Suzuki, K. Takizawa, and M. Yamanaka, “Analysis of trunk stabilization effect by passive power-assist machine,” J. Robot. Mechatron., Vol.26, No.6, pp. 791-798, 2014.
- [10] A. Tsukahara, K. Yoshida, A. Matsushima, K. Ajima, C. Kuroda, N. Mizukami, and M. Hashimoto, “Evaluation of walking smoothness using wearable robotic system curara® for spinocerebellar degeneration patients,” Proc. of 2017 Int. Conf. on Rehabilitation Robotics (ICORR), pp. 1494-1499, 2017.
- [11] T. Kikuchi, K. Sakai, and I. Abe, “Development of Bio-inspired Knee Joint for Power Assist Suit and Evaluation of Its Basic Performance,” Proc. of JSME Conf. on Robotics and Mechanics, 1P1-02a2, 2016.
- [12] H. Arakawa, S. Mohri, K. Yokoyama, Y. Yamada, I. Kikutani, and T. Nakamura, “Proposal of Non-rotating Joint Drive Type Mechanical Assist Device for Squat Lifting by Using Leaf and Compression Spring,” Proc. of 2018 7th IEEE Int. Conf. on Biomedical Robotics and Biomechatronics (Biorob), pp. 330-335, 2018.
- [13] G. Bovi, M. Rabuffetti, P. Mazzoleni, and M. Ferrarin, “A multiple-task gait analysis approach: kinematic, kinetic and EMG reference data for healthy young and adult subjects,” Gait and Posture, Vol.33, No.1, pp. 6-13, 2011.
- [14] M. Kashima, H. Arakawa, S. Kimura, R. Nishihama, K. Yokoyama, I. Kikutani, and T. Nakamura, “Proposal of Passive Type Power Assist Suit for Squat Lifting Considering Walking,” Proc. of 2019 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM), pp. 114-119, 2019.
- [15] T. Kazuo, “Introduction to Clinical Gait Analysis,” Medical and Dental Publishing, 1989.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.