Paper:
Development of Two-Sensation Feedback Device for Myoelectric Prosthetic Hand Users – Compensation of Effect of Temperature Change on Haptic Feedback –
Makuru Isobe* and Chiharu Ishii**
*Graduate School of Science and Engineering, Hosei University
3-7-2 Kajino-cho, Koganei-shi, Tokyo 184-8584, Japan
**Department of Mechanical Engineering, Hosei University
3-7-2 Kajino-cho, Koganei-shi, Tokyo 184-8584, Japan

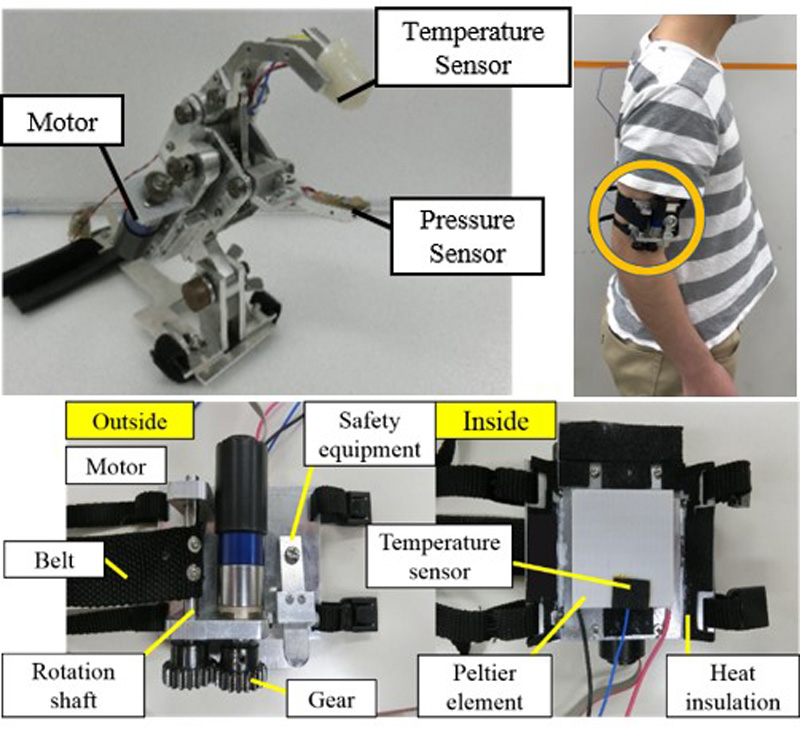
In this study, a feedback device of force and temperature sensations for myoelectric prosthetic hand users was developed. When a prosthetic hand user grasps an object using the myoelectric prosthetic hand, the stiffness and temperature of the object are measured using sensors attached to the prosthetic hand, and force and temperature sensations are fed back to the upper arm of the user. From the experimental evaluation of the feedback device, the influence of temperature change on force sensations was confirmed. Therefore, to feed back the same force sensation to the user even if a temperature change has occurred, compensation functions were derived using the maximum likelihood method. On the basis of paired comparison, verification experiments were conducted, which demonstrated the effectiveness of the derived compensation functions.
Two-sensation feedback device
- [1] F. W. Clippinger, R. Avery, and B. R. Titus, “A Sensory Feedback System for an Upper-Limb Amputation Prosthesis,” Bulletin of Prosthetics Research, pp. 247-258, 1974.
- [2] C. Antfolk, M. D’Alonzo, B. Rosén, G. Lundborg, F. Sebelius, and C. Cipriani, “Sensory Feedback in Upper Limb Prosthetics,” Expert Review of Medical Devices, Vol.10, No.1, pp. 45-54, 2013.
- [3] N. Akimichi, K. Eguchi, and K. Suzuki, “Myoelectric Controlled Prosthetic Hand with Continuous Force-Feedback Mechanism,” Proc. of IEEE Int. Conf. on Systems, Man, and Cybernetics, pp. 3354-3359, Mancester, UK, 2013.
- [4] K. Yada et al., “A Study of Sensory Feedback System for Two Kinds of Information Transmission of EMG Prosthetic Hand,” IEICE Technical Report. ME and Bio Cybernetics, Vol.104, No.401, pp. 11-14, 2004 (in Japanese).
- [5] R. Okuno, M. Yoshida, T. Uchiyama, and K. Akazawa, “Basic Study of Vibrotactile Sensory Feedback System for Biomimetic Powered-Prosthetic Hand,” The Trans. of the Institute of Electrical Engineers of Japan. C, Vol.116, No.11, pp. 1246-1251, 1996 (in Japanese).
- [6] N. H. H. Mohamad Hanif, P. H. Chappell, A. Cranny, and N. M. White, “Vibratory Feedback for Artificial Hands,” Proc. of Int. Conf. on Electronics, Computer and Computation (ICECCO), pp. 247-250, Ankara, Turkey, November 7-9, 2013.
- [7] M. D’Alonzo, S. Dosen, C. Cipriani, and D. Farina, “HyVE: Hybrid Vibro-Electrotactile Stimulation for Sensory Feedback and Substitution in Rehabilitation,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.22, No.2, pp. 290-301, 2014.
- [8] J. Wheeler, K. Bark, J. Savall, and M. Cutkosky, “Investigation of Rotational Skin Stretch for Proprioceptive Feedback With Application to Myoelectric Systems,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.18, No.1, pp. 58-66, 2010.
- [9] A. Akhtar, M. Nguyen, L. Wan, B. Boyce, P. Slade, and T. Bretl, “Passive Mechanical Skin Stretch for Multiple Degree-of-Freedom Proprioception in a Hand Prosthesis,” Haptics: Neuroscience, Devices, Modeling, and Applications, pp. 120-128, 2014.
- [10] A. Otsuka, T. Tsuji, S. Oki, and M. Sakawa, “Development of a Feed-Back-System for Thermal Sensation,” Bulletin of the Japanese Society of Prosthetics and Orthotics, Vol.17, No.2, pp. 135-138, 2001 (in Japanese).
- [11] B. Stephens-Fripp, G. Alici, and R. Mutlu, “A Review of Non-Invasive Sensory Feedback Methods for Transradial Prosthetic Hands,” IEEE Access, Vol.6, pp. 6878-6899, 2018.
- [12] T. Morita, T. Kikuchi, and C. Ishii, “Development of Sensory Feedback Device for Myoelectric Prosthetic Hand to Provide Hardness of Objects to Users,” J. Robot. Mechatron., Vol.28, No.3, pp. 361-370, 2016.
- [13] T. Ueda and C. Ishii, “Development of a Feedback Device of Temperature Sensation for a Myoelectric Prosthetic Hand by Using Peltier Element,” Proc. of 2016 Int. Conf. on Advanced Mechatronic Systems, pp. 488-493, 2016.
- [14] K. Kobayashi, Y. Ueda, and C. Ishii, “Development of Tactile Feeling Feedback Device Based on Vibration for a Myoelectric Prosthetic Hand,” Proc. of JSME Annual Conf. on Robotics and Mechatronics, No.16-2, 2A1-02a2, June 8-11, 2016 (in Japanese).
- [15] J. Kawamura, N. Fukui, M. Nakagawa, T. Fujishita, T. Aoyama, and H. Furukawa, “The Upper-limb Amputees – A Survey and Trends in Kinki Area of Japan –,” The Japanese J. of Rehabilitation Medicine, Vol.36, No.6, pp. 384-389, 1999 (in Japanese).
- [16] F. Kimura et al., “A Sensory Feedback System for EMG-Controlled Prosthetic Hands,” The Proc. of Conf. of Hokkaido Branch 2009, pp. 73-74, 2009 (in Japanese).
- [17] Y. Tanaka, “Sinrigakuteki Sokuteihou Dai 2han (Psychological Measurement Method Second Edition),” University of Tokyo Press, 1977 (in Japanese).
- [18] R. Watanabe and H. Kajimoto, “Pressure Sensation which was Derived From Rapid Temperature Changes,” Proc. of the 19th Annual Conf. of the Virtual Reality Society of Japan, 12A-4, Nagoya, Aichi, September 17-19, 2014 (in Japanese).
- [19] T. Tsumura, “New Methods in Psychoacoustical Measurements,” The J. of the Acoustical Society of Japan, Vol.40, No.1, pp. 45-51, 1983 (in Japanese).
- [20] J. L. Hall, “Maximum-Likelihood Sequential Procedure for Estimation of Psychometric Functions,” The J. of the Acoustical Society of America, Vol.44, No.1, p. 370, 1968.
- [21] B. R. Shelton, M. C. Picardi, and D. M. Green, “Comparison of Three Adaptive Psychophysical Procedures,” The J. of the Acoustical Society of America, Vol.71, No.6, p. 1527, 1982.
- [22] Y. Okamoto, “Effect of the Number of Categories in Methods of Constant Stimuli,” The Japanese J. of Psychonomic Science, Vol.36, No.1, pp. 85-91, 2017 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.