Paper:
Motion-Assist Arm with a Passive Joint for an Upper Limb
Hiroaki Kozuka*, Daisaku Uchijima**, and Hiroshi Tachiya*
*Faculty of Frontier Engineering, Institute of Science and Engineering, Kanazawa University
Kakuma-machi, Kanazawa-shi, Ishikawa 920-1192, Japan
**Robot Development Strategy Department, Robot Development Division, Nachi-Fujikoshi Corp.
Shiodome Sumitomo Bldg., 1-9-2 Higashi-Shinbasi, Minato-ku, Tokyo 105-0021, Japan

This study proposes a motion-assist arm that can accurately support the positioning of a human upper limb. The motion-assist arm is a three-degree-of-freedom (DOF) planer under-actuated robotic arm with a 1-DOF passive joint that can be driven by an human. A control method for the robot arm is as follows. First, when the human moves an output point of the arm manually, the passive joint is rotated with the movement of the output point. Then, for accurate positioning of the output point on a target path, the actuated joints are controlled according to the displacement of the passive joint. Based on the above method, the human can adjust the velocity of the output point deliberately while its position is accurately corrected by the actuated joints. To confirm its effectiveness, the authors conducted tests to assist the human’s upper limb movement along straight target paths, a square path, and free curves paths such as italic letters with the proposed robot arm prototype. From the results of the tests, the authors confirmed that the proposed robot arm can accurately position the upper limb of the human on the target paths while the human intentionally moves the upper limb. It is expected that the proposed arm will be used for rehabilitation because it can aid patients to move their arms correctly. In addition, the proposed arm will enable any human to achieve complex work easily.
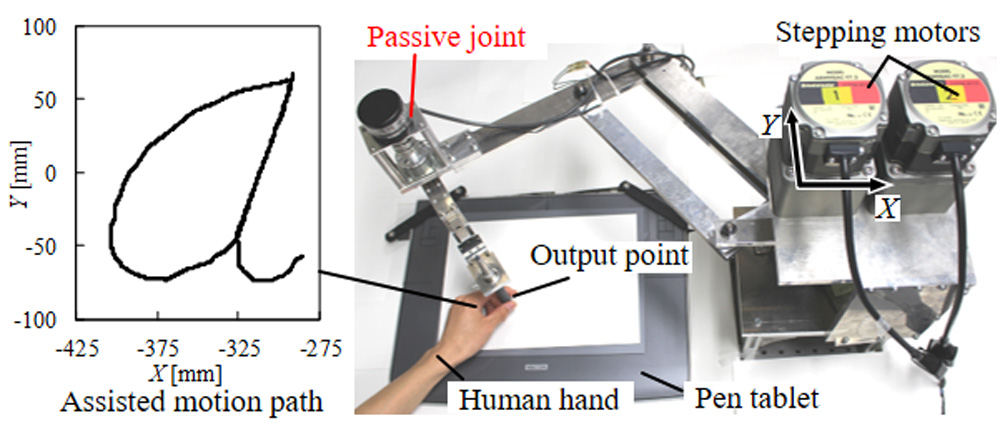
Prototype of motion-assist arm and assisted motion path
- [1] A. Tsukahara, R. Kawanishi, Y. Hasegawa, and Y. Sankai, “Sit-to-Stand and Stand-to-Sit Transfer Support for Complete Paraplegic Patients with Robot Suit HAL,” Advanced Robotics, Vol.24, No.11, pp. 1615-1638, 2010.
- [2] X. Li, T. Noritsugu, M. Takaiwa, and D. Sasaki, “Design of Wearable Power Assist Wear for Low Back Support Using Pneumatic Actuators,” Int. J. Automation Technol., Vol.7, No.2, pp. 228-236, 2013.
- [3] H. Tanaka and M. Hashimoto, “Development of a Non-Exoskeletal Structure for a Robotic Suit,” Int. J. Automation Technol., Vol.8, No.2, pp. 201-207, 2014.
- [4] S. N. Yu, H. D. Lee, S. H. Lee, W. S. Kim, J. S. Han, and C. S. Han, “Design of an Under-Actuated Exoskeleton System for Walking Assist While Load Carrying,” Advanced Robotics, Vol.26, Nos.5-6, pp. 561-580, 2012.
- [5] A. Duschau-Wicke, J. von Zitzewitz, A. Caprez, L. Lünenburger, and R. Riener, “Path Control: A Method for Patient-Cooperative Robot-Aided Gait Rehabilitation,” IEEE Trans. Neural System and Rehabilitation Engineering, Vol.18, No.1, pp. 38-48, 2010.
- [6] N. Hogan, “Impedance Control: An Approach to Manipulation: Part I, II, III,” J. of Dynamic Systems, Measurement and Control, Vol.107, No.1, pp. 1-24, 1985.
- [7] M. Guidali, A. Duschau-Wicke, S. Broggi, V. Klamroth-Marganska, T. Nef, and R. Riener, “A Robotic System to Train Activities of Daily Living in a Virtual Environment,” Medical & Biological Engineering & Computing, Vol.49, No.10, pp. 1213-1223, 2011.
- [8] Q. Liu, A. Liu, W. Meng, Q. Ai, and S. Q. Xie, “Hierarchical Compliance Control of a Soft Ankle Rehabilitation Robot Actuated by Pneumatic Muscles,” Frontiers in Neurorobotics, Vol.11, No.64, 2017.
- [9] R. Kikuuwe, N. Takesue, A. Sano, H. Mochiyama, and H. Fujimoto, “Admittance and Impedance Representations of Friction Based on Implicit Euler Integration,” IEEE Trans. on Robotics, Vol.22, No.6, pp. 1176-1188, 2006.
- [10] M. Peshkin and J. E. Colgate, “Cobots,” Industrial Robot, Vol.26, No.5, pp. 335-341, 1999.
- [11] M. A. Peshkin, J. E. Colgate, W. Wannasuphoprasit, C. A. Moore, R. B. Gillespie, and P. Akella, “Cobot Architecture,” IEEE Trans. on Robotics and Automation, Vol.17, No.4, pp. 377-390, 2001.
- [12] M. Higuchi, “Development of a Human Symbiotic Assist Arm ‘PAS-Arm’ (Design of Mechanism – CVT and Experimental System),” J. Robot. Mechatron., Vol.25, No.1, pp. 211-219, 2013.
- [13] M. Higuchi and T. Ogasawara, “Development of a Human Symbiotic Assist Arm ‘PAS-Arm’ (Experimental System and Creation of Virtual Guiding Surfaces),” J. Robot. Mechatron., Vol.25, No.2, pp. 285-293, 2013.
- [14] A. Goswami, M. A. Peshkin, and J. E. Colgate, “Passive robotics: an exploration of mechanical computation,” Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), Vol.1, pp. 279-284, Cincinnati, USA, May 13-18, 1990.
- [15] A. Goswami and M. Peshkin, “Mechanically implementable accommodation matrices for passive force control,” The Int. J. of Robotics Research, Vol.18, No.8, pp. 830-844, 1999.
- [16] M. R. Reed and W. J. Book, “Modeling and control of an improved dissipative passive haptic display,” Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 311-318, Vol.1, New Orleans, USA, April 26 to May 1, 2004.
- [17] Y. Hirata, A. Hara, and K. Kosuge, “Motion Control of Passive Intelligent Walker Using Servo Brakes,” IEEE Trans. on Robotics, Vol.23, No.5, pp. 981-990, 2007.
- [18] M. Haraguchi, J. Furusho, and R. Kawatani, “2-D Force Display System with Redundant ER Fluid Brake Aimed at Rehabilitation Support System for Upper Limbs,” J. Robot. Mechatron., Vol.24, No.5, pp. 731-742, 2012.
- [19] Y. Hirata, R. Shirai, and K. Kosuge, “Position and orientation control of passive wire-driven motion support system using servo brakes,” Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3702-3707, Singapore, May 29 to June 3, 2017.
- [20] H. Tachiya, H. Kozuka, K. Takizawa, and H. Yoshida, “Assistance for positioning of human by using the passive joint of robot arm,” Trans. of the JSME, Vol.80, No.820, TRANS0345, 2014 (in Japanese).
- [21] M. Uchiyama, “A Study of Computer Control of Motion of a Mechanical Arm: 1st Report, Calculation of Coordinative Motion Considering Singular Points,” Bulletin of the JSME, Vol.22, No.173, pp. 1640-1647, 1979.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.