Paper:
Development and Evaluation of a Close-Fitting Assistive Suit for Back and Arm Muscle – e.z.UP®–
Yun-Ting Liao*, Toshifumi Ishioka**, Kazuko Mishima**, Chiaki Kanda**, Kenji Kodama**, and Eiichiro Tanaka***
*Graduate School of Information, Production and Systems, Waseda University
2-7 Hibikino, Wakamatsu-ku, Kitakyusyu, Fukuoka 808-0135, Japan
**Asahicho Corporation
110 Fukawa-cho, Fuchu-city, Hiroshima 726-0004, Japan
***Faculty of Science and Engineering, Waseda University
2-7 Hibikino, Wakamatsu-ku, Kitakyusyu, Fukuoka 808-0135, Japan

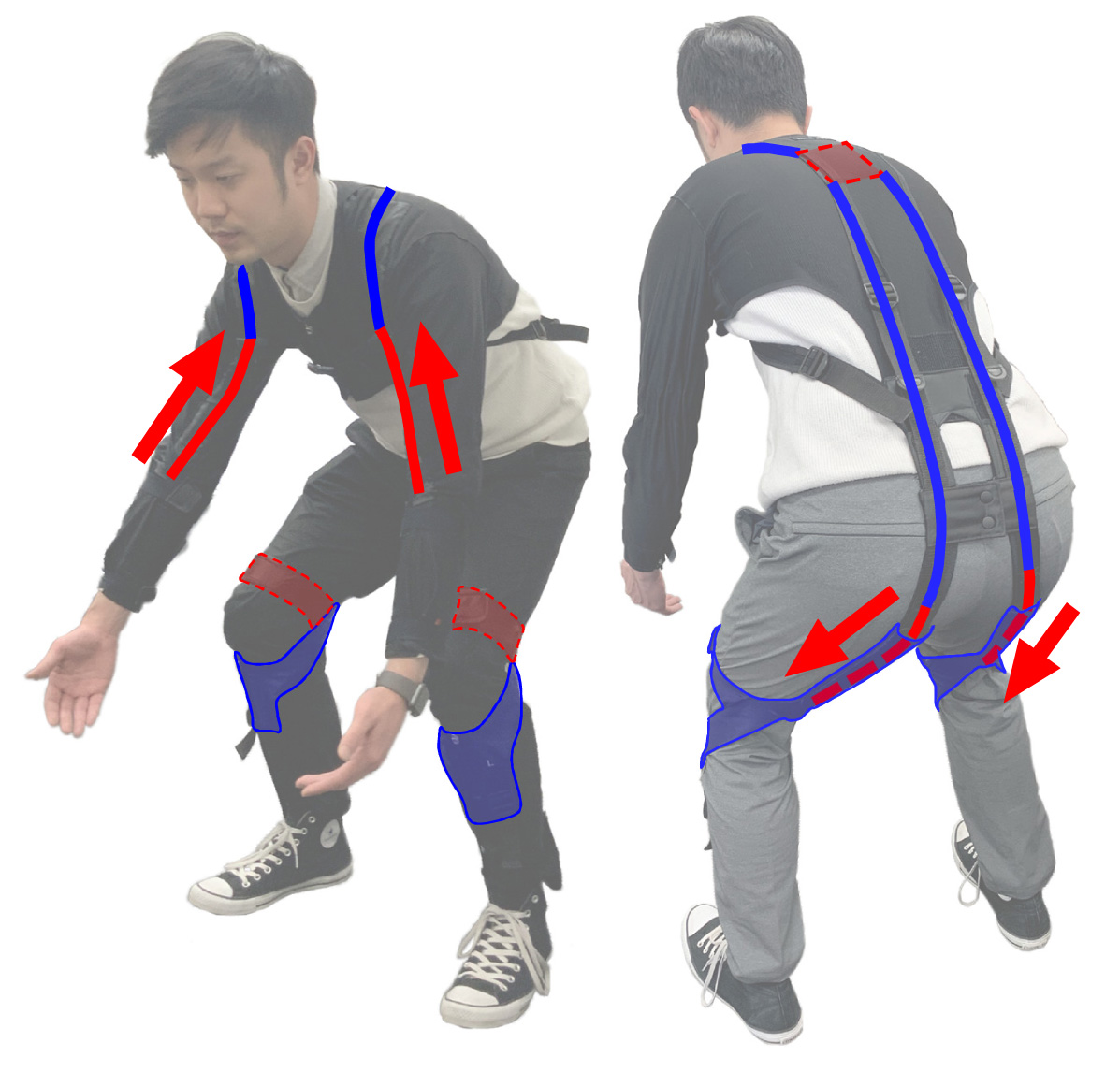
This paper proposes a close-fitting assistive suit, called e.z.UP®, with a passive actuation mechanism composed of an adjustable structure. The suit can adequately assist the back and arm muscles of a user with the proposed layout of an arm assistive belt and a two-layer structure, respectively. With its lightweight characteristic (i.e., weighing 0.75 kg only), the proposed suit is portable and easy to wear without additional burden. By using the averaged Japanese body data, a simulation was conducted based on a human body model wearing our proposed suit to evaluate the layout of the arm assistive belt. The simulation results prove that the proposed suit can adequately assist the user’s arm muscles based on the user’s motion. An experiment involving the measurement of muscle activities is also implemented with seven young subjects and seven middle-aged subjects to evaluate the arm assistive belt and the two-layer structure. The experimental results reveal that the proposed suit can successfully and appropriately assist both the arm and back muscles simultaneously.
Lift-up motion assistive suit
- [1] M. Suka and K. Yoshida, “Low back pain deprives the Japanese adult population of their quality of life: a questionnaire survey at five healthcare facilities in Japan,” Environmental Health and Preventive Medicine, Vol.13, No.2, pp. 109-115, 2008.
- [2] W. Montgomery, M. Sato, Y. Nagasaka, and J. Vietri, “The economic and humanistic costs of chronic lower back pain in Japan,” ClinicoEconomics and Outcomes Research, Vol.9, pp. 361-371, 2017.
- [3] M. Ishii, K. Yamamoto, and K. Hyodo, “Stand-Alone Wearable Power Assist Suit – Development and Availability –,” J. Robot. Mechatron., Vol.17, No.5, pp. 575-583, 2005.
- [4] Y. Muramatsu, H. Kobayashi, Y. Sato, H. Jiaou, T. Hashimoto, and H. Kobayashi, “Quantitative Performance Analysis of Exoskeleton Augmenting Devices – Muscle Suit – for Manual Worker,” Int. J. Automation Technol., Vol.5, No.4, pp. 559-567, 2011.
- [5] K. Sano, E. Yagi, and M. Sato, “Development of a Wearable Assist Suit for Walking and Lifting-Up Motion Using Electric Motors,” J. Robot. Mechatron., Vol.25, No.6, pp. 923-930, 2013.
- [6] H. Kobayashi, T. Shiiba, and Y. Ishida, “Realization of All 7 Motions for the Upper Limb by a Muscle Suit,” J. Robot. Mechatron., Vol.16, No.5, pp. 504-512, 2004.
- [7] C. Thakur, K. Ogawa, and Y. Kurita, “Active Passive Nature of Assistive Wearable Gait Augment Suit for Enhanced Mobility,” J. Robot. Mechatron., Vol.30, No.5, pp. 717-728, 2018.
- [8] Y. Naruoka, N. Hiramitsu, and Y. Mitsuya, “A Study of Power-Assist Technology to Reduce Body Burden During Loading and Unloading Operations by Support of Knee Joint Motion,” J. Robot. Mechatron., Vol.28, No.6, pp. 949-957, 2016.
- [9] C. A. Lotz, M. J. Agnew, A. A. Godwin, and J. M. Stevenson, “The effect of an on-body personal lift assist device (PLAD) on fatigue during a repetitive lifting task,” J. of Electromyography and Kinesiology, Vol.19, No.2, pp. 331-340, 2009.
- [10] D. Park and K.-J. Cho, “Development and evaluation of a soft wearable weight support device for reducing muscle fatigue on shoulder,” PLOS ONE, Vol.12, No.3, e0173730, doi: 10.1371/journal.pone.0173730, 2017.
- [11] Y. Imamura, T. Tanaka, Y. Suzuki, K. Takizawa, and M. Yamanaka, “Motion-Based-Design of Elastic Material for Passive Assistive Device Using Musuloskeletal Model,” J. Robot. Mechatron., Vol.23, No.6, pp. 978-990, 2011.
- [12] E. Tanaka, K. Muramatsu, K. Watanuki, S. Saegusa, Y. Iwasaki, and L. Yuge, “Development of a Rubber Belt Suit for Lift-Up Motion to Assist both Upper Limb and Back and Evaluation of Muscle Activity,” J. of Japan Society for Design Engineering, Vol.52, No.6, pp. 405-418, 2017 (in Japanese).
- [13] Y.-T. Liao, K. Kodama, T. Ishioka, H.-H. Lee, and E. Tanaka, “Development and Evaluation of a Worker-Wear Assistance Suit with the Adjustable and Concealable Elastic Structure for the Manual Handling Workers,” 2018 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM), pp. 1252-1256, Auckland, New Zealand, July 9-12, 2018.
- [14] Y.-L. Chen, “Changes in lifting dynamics after localized arm fatigue,” Int. J. of Industrial Ergonomics, Vol.25, No.6, pp. 611-619, 2000.
- [15] Y. Kouchi, K. Yokoyama, J. Yamashita, T. Yokoi, H. Ogi, M. Yoshioka, H. Atsumi, and A. Hotta, “Human body dimensions data for ergonomic design,” Report of National Institute of Bioscience and Human-Technology, Vol.2, No.1, pp. 119-126, 1996.
- [16] P. de Leva, “Adjustments to Zatsiorsky-Seluyanov’s segment inertia parameters,” J. of Biomechanics, Vol.29, No.9, pp. 1223-1230, 1996.
- [17] R. Drillis, R. Contini, and M. Bluestein, “Body Segment Parameters: A Survey of Measurement Techniques,” Artificial Limbs, Vol.8, No.1, pp. 44-66, 1964.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.