Paper:
A Water-Hydraulic Upper-Limb Assistive Exoskeleton System with Displacement Estimation
Takahiro Kosaki and Shigang Li
Department of Systems Engineering, Graduate School of Information Sciences, Hiroshima City University
3-4-1 Ozuka-higashi, Asaminami-ku, Hiroshima 731-3194, Japan

This paper describes the development of an angle-sensorless exoskeleton with a tap water-driven artificial muscle actuator. The artificial muscle actuator consisted of an elastic rubber tube reinforced by braided fiber. Such actuators are highly flexible, lightweight, and water-resistant, and thus are inherently safe even for operations in direct contact with humans. An estimation system for the displacement of the artificial muscle actuator based on the water flow rates detected by flowmeters was constructed for the water-hydraulic exoskeleton. In addition, estimators of the velocity and acceleration of the actuator based on the estimated displacement and the measured flow rates were derived and incorporated into the estimation system. With this system, our previous wearable upper-limb assistive exoskeleton prototype was converted into an angle-sensorless version with higher safety in wet conditions. Its assistive performance was evaluated through experiments with research participants. Experimental results demonstrated that muscle activity could be reduced, although an assistive control strategy was executed with the variables estimated, excluding force.
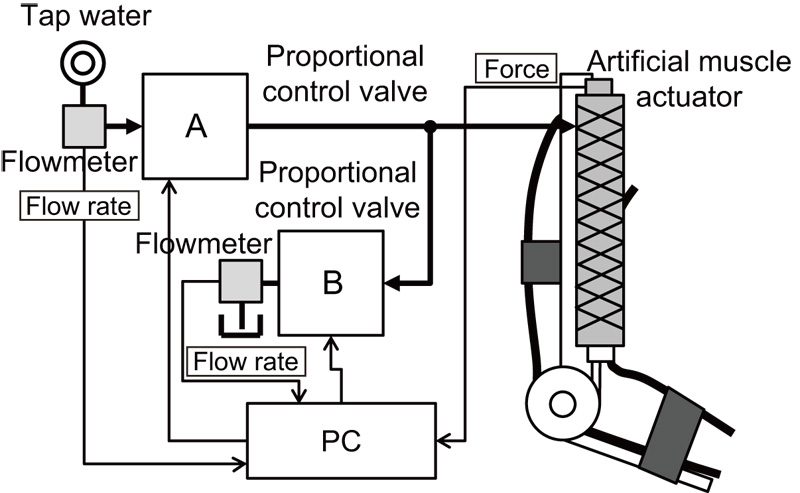
Water-hydraulic exoskeleton system
- [1] Cabinet Office, “Government of Japan: Annual report on the aging society,” 2016.
- [2] Q. Meng and M. H. Lee, “Design issues for assistive robotics for the elderly,” Advanced Engineering Informatics, Vol.20, No.2, pp. 171-186, 2006.
- [3] H. Lee, W. Kim, J. Han, and C. Han, “The technical trend of the exoskeleton robot system for human power assistance,” Int. J. Precis. Eng. Manuf., Vol.13, No.8, pp. 1491-1497, 2012.
- [4] F. Xiao, Y. Gao, Y. Wang, Y. Zhu, and J. Zhao, “Design and evaluation of a 7-DOF cable-driven upper limb exoskeleton,” J. of Mechanical Science and Technology, Vol.32, No.2, pp. 855-864, 2018.
- [5] H. Inoue and T. Noritsugu, “Development of Upper-Limb Power Assist Machine Using Linkage Mechanism – Drive Mechanism and its Applications –,” J. Robot. Mechatron., Vol.30, No.2, pp. 214-222, 2018.
- [6] Y. Long, Z. Du, C. Chen, W. Wang, L. He, X. Mao, G. Xu, G. Zhao, and W. Dong, “Hybrid control scheme of a hydraulically actuated lower extremity exoskeleton for load-carrying,” J. Intell. Robot. Syst., Vol.91, pp. 493-500, doi: 10.1007/s10846-017-0708-1, 2017.
- [7] S. Chen, Z. Chen, B. Yao, X. Zhu, S. Zhu, Q. Wang, and Y. Song, “Adaptive robust cascade force control of 1-DOF hydraulic exoskeleton for human performance augmentation,” IEEE/ASME Trans. Mechatronics, Vol.22, No.2, pp. 589-600, 2017.
- [8] E. T. Wolbrecht, D. J. Reinkensmeyer, and J. E. Bobrow, “Pneumatic control of robots for rehabilitation,” The Int. J. of Robotics Research, Vol.29, No.1, pp. 23-38, 2010.
- [9] J. L. Ramos and M. A. Meggiolaro, “Use of surface electromyography for human amplification using an exoskeleton driven by artificial pneumatic muscles,” Proc. of 2014 5th IEEE RAS & EMBS Int. Conf. on Biomedical Robotics and Biomechatronics, pp. 585-590, 2014.
- [10] S. Mamiya, T. Takahashi, and N. Uchiyama, “Design and Experimental Verification of a Pantograph-Based Mechanism for Lower Limb Load Reduction by Compensating for Upper Body Weight,” J. Robot. Mechatron., Vol.30, No.1, pp. 33-42, 2018.
- [11] P. Maciejasz, J. Eschweiler, K. Gerlach-Hahn, A. Jansen-Troy, and S. Leonhardt, “A survey on robotic devices for upper limb rehabilitation,” J. NeuroEngineering and Rehabilitation, Vol.11, No.3, doi: 10.1186/1743-0003-11-3, 2014.
- [12] R. A. R. C. Gopura, D. S. V. Bandara, K. Kiguchi, and G. K. I. Mannc, “Developments in hardware systems of active upper-limb exoskeleton robots: a review,” Robotics and Autonomous Systems, Vol.75, No.B, pp. 203-220, doi: 10.1016/j.robot.2015.10.001, 2016.
- [13] N. Rehmat, J. Zuo, W. Meng, Q. Liu, S. Q. Xie, and H. Liang, “Upper limb rehabilitation using robotic exoskeleton systems: a systematic review,” Int. J. of Intelligent Robotics and Applications, Vol.2, pp. 283-295, doi: 10.1007/s41315-018-0064-8, 2018.
- [14] T. Kosaki, A. Nitanda, K. Atsuumi, and S. Li, “Development of an Elbow Power Assist Device with a Water-Hydraulic Muscle Actuator,” Trans. of the JSME, Vol.82, No.841, doi: 10.1299/transjsme.16-00174, 2016 (in Japanese).
- [15] K. K. K. Ku, R. S. Bradbeer, K. K. Y. Lam, L. F. Yeung, and R. C. W. Li, “A novel actuator for underwater robots,” IEEE J. Ocean. Eng. Vol.34, No.3, pp. 331-342, 2009.
- [16] M. Shibata, Y. Onishi, and S. Kawamura, “Experimental evaluation of a flexible joint driven by water pressure for underwater robots,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4011-4016, 2010.
- [17] T. Kawamura, K. Takanaka, T. Nakamura, and H. Osumi, “Development of an orthosis for walking assistance using pneumatic artificial muscle: A quantitative assessment of the effect of assistance,” Proc. of 2013 IEEE 13th Int. Conf. on Rehabilitation Robotics, 2013.
- [18] P. Beyl, M. Van Damme, R. Van Ham, B. Vanderborght, and D. Lefeber, “Pleated pneumatic artificial muscle-based actuator system as a torque source for compliant lower limb exoskeletons,” IEEE/ASME Trans. Mechatron. Vol.19, No.3, pp. 1046-1056, 2014.
- [19] S. Wan, M. Yang, R. Xi, X. Wang, R. Qian, and Q. Wu, “Design and control strategy of humanoid lower limb exoskeleton driven by pneumatic artificial muscles,” Proc. of 2016 23rd Int. Conf. on Mechatronics and Machine Vision in Practice, 2016.
- [20] Ministry of Health, Labour and Welfare, “Guidelines on the prevention of low back pain in the workplace,” 2013 (in Japanese).
- [21] N. Hogan, “Impedance control: an approach to manipulation: part I, II, and III,” J. Dynamic Syst., Measurement, and Control, Trans. ASME, Vol.107, pp. 1-24, 1985.
- [22] S. Tachi, T. Sakaki, H. Arai, S. Nishizawa, and J. F. Pelaez-Polo, “Impedance control of a direct-drive manipulator without using force sensors,” Advanced Robotics, Vol.5, No.2, pp. 183-205, 1990.
- [23] J. Cao, A. McDaid, K. Kora, and S. Xie, “Control strategies for human-inspired robotic exoskeleton (HuREx) gait trainer,” Proc. of the 12th IEEE/ASME Int. Conf. Mechatronic and Embedded Syst. and Applicat., 2016.
- [24] S. Jezernik, G. Colombo, T. Keller, H. Frueh, and M. Morari, “Robotic orthosis Lokomat: a rehabilitation and research tool,” Neuromodulation, Vol.6, No.2, pp. 108-115, 2003.
- [25] Z. Li, Z. Huang, W. He, and C.-Y. Su, “Adaptive impedance control for an upper limb robotic exoskeleton using biological signals,” IEEE Trans. Ind. Electron., Vol.64, No.2, pp. 1664-1674, 2017.
- [26] H. Kazerooni and R. Steger, “The Berkeley lower extremity exoskeleton,” J. Dynamic Syst., Measurement, and Control, Trans. ASME, Vol.128, pp. 14-25, 2006.
- [27] A. B. Zoss, H. Kazerooni, and A. Chu, “Biomechanical design of the Berkeley lower extremity exoskeleton (BLEEX),” IEEE/ASME Trans. Mechatron., Vol.11, No.2, pp. 128-138, 2006.
- [28] W. Kobayashi and K. Ito, “Displacement estimation of tap-water driven McKibben muscles,” Proc. of Int. Conf. on Fluid Power and Mechatronics, pp. 672-676, 2015.
- [29] M. Jelali and A. Kroll, “Hydraulic Servo-Systems: Modelling, Identification and Control,” Springer-Verlag London, UK, 2003.
- [30] T. Kagawa, T. Fujita, and T. Yamanaka, “Nonlinear model of artificial muscle,” Trans. Soc. Instrument and Control Engineers, Vol.29, No.10, pp. 1241-1243, 1993 (in Japanese).
- [31] J. L. Pons, “Wearable Robots: Biomechatronic Exoskeletons,” John Wiley & Sons Ltd., Chichester, UK, 2008.
- [32] J. E. Hall, “Guyton and Hall Textbook of Medical Physiology, 13th Ed.,” W B Saunders Co., Philadelphia, PA, USA, 2015.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.