Paper:
Development of a Bridge Inspection Support Robot System Using Two-Wheeled Multicopters
Manabu Nakao, Eiji Hasegawa, Taku Kudo, and Naoyuki Sawasaki
Fujitsu Laboratories Limited
4-1-1 Kamikodanaka, Nakahara-ku, Kawasaki-shi, Kanagawa 211-8588, Japan

We developed a bridge inspection support robot system that uses a two-wheeled multicopter and 3D modeling technology. Our system is divided into three main parts: 1) a two-wheeled multicopter to capture close-up images of the inspection target, 2) damage extraction using 3D modeling technology, and 3) a 3D model-based bridge maintenance system that stores inspection information linked with the Industry Foundation Classes (IFC) 3D product model. An inspector can use this system to visually inspect the overall structure and accurately detect hairline cracks.
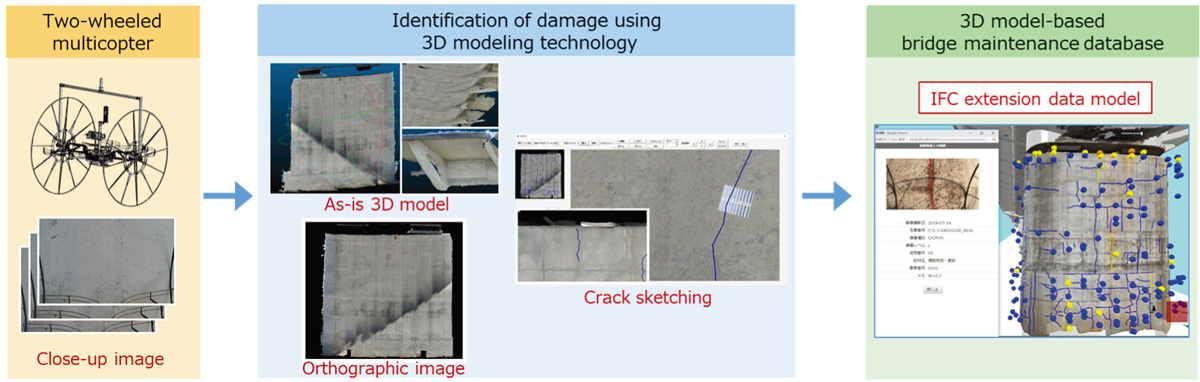
Outline of the bridge inspection robot system
- [1] A. Bulgakow and S. Emeliznov, “Inspection of Flyover Bridges Using Quadrotor,” Proc. of 32st Int. Symp. on Automation and Robotics in Construction (ISARC 2015), pp. 1-7, 2015.
- [2] C. Yang, M. Wen, Y. Chen, and S. Kang, “An Optimized Unmanned Aerial System for Bridge Inspection,” Proc. of 32st Int. Symp. on Automation and Robotics in Construction (ISARC 2015), pp. 1-6, 2015.
- [3] M. Gillins, D. Gillins, and C. Parrish, “Cost-Effective Bridge Safety Inspection using Unmanned Aircraft Systems (UAV),” Proc. of Geotechnical and Structural Engineering Congress 2016, pp. 1931-1940, 2016.
- [4] S. Mizutani, Y. Okada, C. Salaan, T. Ishii, K. Ohno, and S. Tadokoro, “Proposal and experimental validation of a design strategy for a UAV with a passive rotating spherical shell,” Proc. of 2015 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 1271-1278, 2015.
- [5] M. Nakao, Y. Hada et al., “Development of a bridge inspection support robot system that uses a two-wheeled quad-rotor helicopter,” Proc. of The 14th East Asia-Pacific Conf. on Structural Engineering and Construction (EASEC-14), S3.460, 2016.
- [6] Y. Hada, M. Nakao et al., “Development of a Bridge Inspection Support System using Two-Wheeled Multicopter and 3D Modeling Technology,” J. Disaster Res., Vol.12, No.3, pp. 593-606, 2017.
- [7] N. Takahashi, M. Yamada et al., “All-round two-wheeled quadrotor helicopters with protect-frames for air-land-sea vehicle,” Advanced Robotics, Vol.29, No.1, pp. 69-87, 2015.
- [8] R. Sacks, A. Kedar et al., “SeeBridge Information Delivery Manual (IDM) for Next Generation Bridge Inspection,” Proc. of 33rd Int. Symp. on Automation and Robotics in Construction (ISARC 2016), pp. 826-834, 2016.
- [9] F. Tanaka, M. Tsuchida et al., “Bridge Information Modeling based on IFC for supporting maintenance management of existing bridges,” Proc. of 17th Int. Conf. on Computing in Civil and Building Engineering (ICCCBE2018), pp. 1-8, 2018
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.