Paper:
Autonomous Adaptive Flight Control of a UAV for Practical Bridge Inspection Using Multiple-Camera Image Coupling Method
Kenta Hidaka, Daiki Fujimoto, and Kazuya Sato
Department of Mechanical Engineering, Faculty of Science and Engineering, Saga University
1 Honjo-machi, Saga-shi, Saga 840-8502, Japan

Recently, with the deterioration of bridge facilities, demand has arisen for a method to inspect many bridges efficiently. One proposed bridge inspection method involves observation and inspection of cracks on undersides of bridges using a video camera mounted on an unmanned aerial vehicle (UAV) that flies under the bridges. There is an option to have a pilot operate the UAV, but it is desirable to have the UAV fly autonomously when efficiency of inspection is considered. Though there is a method using GPS for autonomous flight control of UAVs, there are many cases in which GPS cannot be utilized under bridges, and a new method is required for autonomous flight control in such places. The authors have already shown that autonomous flight control of UAVs can be achieved within the range of a monocular camera image by measuring the position of a UAV using camera images. However, since the flight range is bounded by the monocular camera image, it is necessary to move the camera position to fly the UAV autonomously in a wider space. In this paper, it is shown that a UAV can achieve autonomous flight control in wider spaces by constructing a single coordinate system for a combination of two camera images. In addition, considering that various measuring instruments might be mounted on a UAV, an adaptive control method capable of obtaining good control performance without changing the design parameters of the controllers should be applied. This method is useful for maintaining control performance when the total weight of the UAV changes. To show the effectiveness of our proposed method, we give an appropriate practical flight target orbit and present its experimental results.
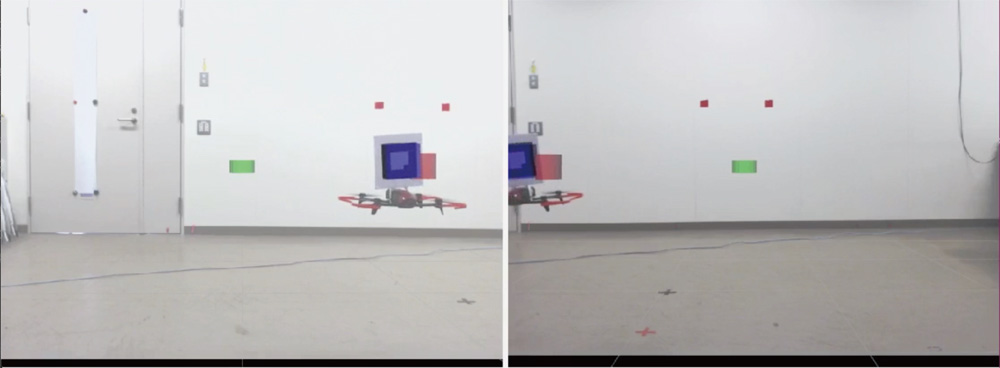
Adaptive flight control of UAV using camera
- [1] K. Nonami, “Drone Technology, Cutting-Edge Drone Business, and Future Prospects,” J. Robot. Mechatron., Vol.28, No.3, pp. 262-272, 2016.
- [2] K. Sato, T. Kasahara, R. Daikoku, and T. Izu, “A Proposal of Autonomous Flight Control Method of Multicopter for the Inspection of Under the Bridge,” Proc. of 16th SICE Symp. on Industrial Application Systems, pp. 22-26, 2015 (in Japanese).
- [3] K. Sato and R. Daikoku, “A Simple Autonomous Flight Control of Multicopter Using Only Web Camera,” J. Robot. Mechatron., Vol.28, No.3, pp. 286-294, 2016.
- [4] K. Sato, T. Kasahara, and T. Izu, “A Simple Autonomous Flight Control Method of Quadrotor Helicopter using only single Web Camera,” Proc. of 2016 Int. Conf. on Unmanned Aircraft Systems (ICUAS), pp. 671-678, 2016.
- [5] I. Fujii and K. Sato, “Formation Control of Multi Robots using Multiple-camera with ROS,” The 59th Japan Automatic Control Conf., FrB6-1, 2016 (in Japanese).
- [6] K. Hidaka and K. Sato, “Autonomous Flight Control of Small UAV Based on the Multiple-Camera Image Coupling,” Proc. of SICE Annual Conf., ThC07.2, 2018.
- [7] M. Krstic, I. Kanellakopoulos, and P. Kokotovic, “Nonlinear and Adaptive Control Design,” Wiley-Interscience, 1995.
- [8] K. Sato, Y. Mishima, K. Tsuruta, and K. Murata, “Adaptive H∞ Control for Linear Slider with Friction Compensation, – Using σ-modification Strategy –,” Proc. of the IEEE Int. Conf. on Control Applications, pp. 794-799, 2004.
- [9] Y. Oda and M. Kumon, “Autonomous Flight Control of Quadrotor Helicopter by Simple Adaptive Control with Inner Loop PD Controller,” J. Robot. Mechatron., Vol.30, No.3, pp. 380-389, 2018.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.