Paper:
Reliable Activation of an EPM-Based Clinging Device for Aerial Inspection Robots
Arata Masuda, Akihiro Tanaka, Yoshiyuki Higashi, and Nanako Miura
Kyoto Institute of Technology
Matsugasaki-Gosho-Kaido-cho, Sakyo-ku, Kyoto 606-8585, Japan

This study aims to develop a clinging device for structural inspection robots, which are expected to be used to reduce the cost of inspection of aging civil infrastructure and industrial structures. In a previous study, an electro-permanent magnet (EPM)-based clinging device that could electrically turn on and off the magnetic adhesive force against steel structures was proposed. In this study, a more versatile design of the clinging device was firstly presented, and a considerable difficulty regarding the activation process of the EPM which might impair the reliability of the clinging device was stated based on mathematical modeling and experiments. The concept of a two-step activation process was then presented to overcome the stated difficulty, and its implementation using a limit switch-based contact sensor was successfully demonstrated through collision tests. Furthermore, sensorless realization of contact detection by measuring the induced voltage across the coil of the EPM was proposed, and its feasibility was validated.
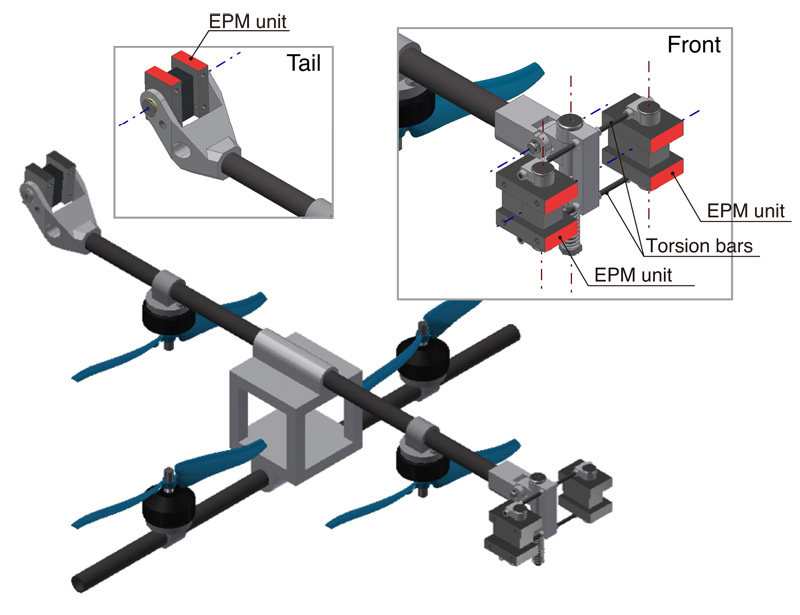
A UAV with EPM-based clinging devices
- [1] I. Tsitsimpelis, C. J. Taylor, B. Lennox, and M. J. Joyce, “A review of ground-based robotic systems for the characterization of nuclear environments,” Progress in Nuclear Energy, Vol.111, pp. 109-124, 2019.
- [2] N. S. Roslin, A. Anuar, M. F. A. Jalal, and K. S. M. Sahari, “A review: hybrid locomotion of in-pipe inspection robot,” Procedia Engineering, Vol.41, pp. 1456-1462, 2012.
- [3] A. Nayak and S. Pradhan, “Design of a new in-pipe inspection robot,” Procedia Engineering, Vol.97, pp. 2081-2091, 2014.
- [4] R. Montero, J. Victores, S. Martínez, A. Jardón, and C. Balaguer, “Past, present and future of robotic tunnel inspection,” Automation in Construction, Vol.59, pp. 99-112, 2015.
- [5] L. Li, “The UAV intelligent inspection of transmission lines,” Proc. of Int. Conf. on Advances in Mechanical Engineering and Industrial Informatics, Li2015/04, 2015.
- [6] C.-A. Liu, R. Dong, H. Wu, G.-T. Yang, and W. Lin, “A 3D laboratory test-platform for overhead power line inspection,” Int. J. of Advanced Robotic Systems, Vol.13, No.2, pp. 1-12, 2016.
- [7] O. Menéndez, M. Pérez, and F. auat Cheein, “Visual-based positioning of aerial maintenance platforms on overhead transmission lines,” Applied Sciences, Vol.9, pp. 165-186, 2019.
- [8] M. Ciszewski, L. Mitka, P. Kohut, T. Buratowski, and M. Giergiel, “Robotic system for off-shore infrastructure monitoring,” J. of Marine Engineering & Technology, Vol.16, No.4, pp. 310-318, 2017.
- [9] H. M. La, N. Gucunski, K. Dana, and S.-H. Kee, “Development of an autonomous bridge deck inspection robotic system,” J. of Field Robotics, Vol.34, No.8, pp. 1489-1504, 2017.
- [10] S. Dorafshan and M. Maguire, “Bridge inspection: human performance, unmanned aerial systems and automation,” J. of Civil Structural Health Monitoring, Vol.8, pp. 443-476, 2018.
- [11] V. Nayak, C. Papachristos, and K. Alexis, “Design and control of an aerial manipulator for contact-based inspection,” ArXiv, abs/1804.03756, 2018.
- [12] S. Hamaza, I. Georgilas, and T. Richardson, “An adaptive-compliance manipulator for contact-based aerial applications,” Proc. of 2018 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM), pp. 730-735, July 2018.
- [13] Y. Tokura, K. Toba, and Y. Takada, “Practical applications of HORNET to inspect walls of structures,” J. Robot. Mechatron., Vol.28, No.3, pp. 320-327, 2016.
- [14] Y. Takada, Y. Tokura, Y. Matsumura, T. Tanaka, and T. Kanada, “Wall inspection robot with maneuvering assist control system against crosswind,” J. Robot. Mechatron., Vol.30, No.3, pp. 416-425, 2018.
- [15] R. A. Mattar and R. Kalai, “Development of a wall-sticking drone for non-destructive ultrasonic and corrosion Testing,” Drones, Vol.2, No.1, pp. 1-11, 2018.
- [16] A. L. Desbiens, A. T. Asbeck, and M. R. Cutkosky, “Scansorial landing and perching,” Robotics Research, Vol.70, pp. 169-184, 2011.
- [17] E. W. Hawkes, D. L. Christensen, E. V. Eason, M. A. Estrada, M. Heverly, E. Hilgemann, H. Jiang, M. T. Pope, A. Parness, and M. R. Cutkosky, “Dynamic surface grasping with directional adhesion,” Proc. of 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 5487-5493, November 2013.
- [18] M. A. Estrada, E. W. Hawkes, D. L. Christensen, and M. R. Cutkosky, “Perching and vertical climbing: design of a multimodal robot,” Proc. of 2014 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 4215-4221, May 2014.
- [19] S. Akahori, Y. Higashi, and A. Masuda, “Development of an aerial inspection robot with EPM and camera arm for steel structures,” Proc. of 2016 IEEE Region 10 Conf. (TENCON 2016), pp. 3542-3545, November 2016.
- [20] Y. Higashi, S. Akahori, A. Masuda, and K. Takeuchi, “Verification of an EPM system for an aerial inspection robot and close-up image shooting,” Advanced Experimental Mechanics, Vol.1, pp. 179-184, 2016.
- [21] M. T. Pope, C. W. Kimes, H. Jiang, E. W. Hawkes, M. A. Estrada, C. F. Kerst, W. R. T. Roderick, A. K. Han, D. L. Christensen, and M. R. Cutkosky, “A multimodal robot for perching and climbing on vertical outdoor surfaces,” IEEE Trans. on Robotics, Vol.33, No.1, pp. 38-48, February 2017.
- [22] K. Takeuchi, A. Masuda, S. Akahori, Y. Higashi, and N. Miura, “A close inspection and vibration sensing aerial robot for steel structures with an EPM-based landing device,” Proc. of SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, 101692U, 2017.
- [23] D. Schmidt and K. Berns, “Climbing robots for maintenance and inspections of vertical structures – A survey of design aspects and technologies,” Robotics and Autonomous Systems, Vol.61, No.12, pp. 1288-1305, 2013.
- [24] H. Zhang, J. Zhang, G. Zong, W. Wang, and R. Liu, “Sky Cleaner 3: a real pneumatic climbing robot for glass-wall cleaning,” IEEE Robotics Automation Magazine, Vol.13, No.1, pp. 32-41, March 2006.
- [25] A. T. Asbeck, S. Kim, M. R. Cutkosky, W. R. Provancher, and M. Lanzetta, “Scaling hard vertical surfaces with compliant microspine arrays,” The Int. J. of Robotics Research, Vol.25, No.12, pp. 1165-1179, 2006.
- [26] F. Xu, X. Wang, and G. Jiang, “Design and analysis of a wall-climbing robot based on a mechanism utilizing hook-like claws,” Int. J. of Advanced Robotic Systems, Vol.9, No.6, 53895, 2012.
- [27] A. Parness, M. Frost, N. Thatte, K. P. Jonathan, K. Witkoe, M. Nevarez, M. Garrett, H. Aghazarian, and B. Kennedy, “Gravity-independent rock-climbing robot and a sample acquisition tool with microspine grippers,” J. of Field Robotics, Vol.30, No.6, pp. 897-915, 2013.
- [28] Y. Higashi, “Concept of an inspection robot for H-shaped steel structures,” Proc. of 2017 IEEE Region 10 Conf. (TENCON 2017), pp. 339-343, November 2017.
- [29] Y. Takada, S. Ito, and N. Imajo, “Development of a bridge inspection robot capable of traveling on splicing parts,” Inventions, Vol.2, No.22, pp. 1-13, 2017.
- [30] T. Bandyopadhyay, R. Steindl, F. Talbot, N. Kottege, R. Dungavell, B. Wood, J. Barker, K. Hoehn, and A. Elfes, “Magneto: a versatile multi-limbed inspection robot,” Proc. 2018 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 2253-2260, 2018.
- [31] A. Yamamoto, T. Nakashima, and T. Higuchi, “Wall climbing mechanisms using electrostatic attraction generated by flexible electrodes,” Proc. 2007 Int. Symp. on Micro-NanoMechatronics and Human Science, pp. 389-394, November 2007.
- [32] H. Wang, A. Yamamoto, and T. Higuchi, “A crawler climbing robot integrating electroadhesion and electrostatic actuation,” Int. J. of Advanced Robotic Systems, Vol.11, No.12, pp. 1-11, 2014.
- [33] A. N. Knaian, “Electropermanent magnetic connectors and actuators: devices and their application in programmable matter,” Ph.D. thesis, Massachusetts Institute of Technology, 2010.
- [34] R. J. Parker and R. J. Studders, “Permanent magnets and their application,” Wiley, 1962.
- [35] P. Campbell and S. Al-Murshid, “A model of anisotropic Alnico magnets for field computation,” IEEE Trans. on Magnetics, Vol.18, No.3, pp. 898-904, May 1982.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.