Paper:
Development of Concrete Inspection Robot with Dual Stage Suckers
Yuta Matsumoto*, Isao Kurashige**, and Kan Yoneda*
*Chiba Institute of Technology
2-17-1 Tsudanuma, Narashino-shi, Chiba 275-0016, Japan
**Central Research Institute of Electric Power Industry
1646 Abiko, Chiba 270-1194, Japan

To automate nondestructive inspections for concrete walls by measuring their air permeability, we developed a wall climbing robot with suckers. It is configured to move by alternately moving the central body and the four leg tip suckers forward. The central sucker is a triple ring type, making it useful for climbing and measuring as well as acquiring the air permeability data in the depth direction. The leg tip suckers use a sponge material to ensure good sealing with the concrete wall and are double suckers when incorporated with bellows to generate power that sticks them fast, by pressing the bellows at the beginning of the fast-sticking process. The dual stage fast-sticking process first sucks by using the bellows only and then the whole sucker follows after the sponge parts are almost fast stuck. To automate the dual stage fast-sticking process, we developed two automatic switching systems: one switches relative to the distance between the sucker and the wall surface and the other, relative to the pressure in the bellows. We experimentally demonstrated that with both switching systems, when the sucker approaches a concrete wall with a weak force, the first stage fast-sticking process takes 1 s or lesser and the complete fast-sticking process, approximately 5 s. We also proved that the developed wall climbing robot incorporating the above-mentioned fast-sticking mechanism can climb a concrete wall at approximately 440 mm/min to acquire the concrete’s nondestructive air permeability test data.
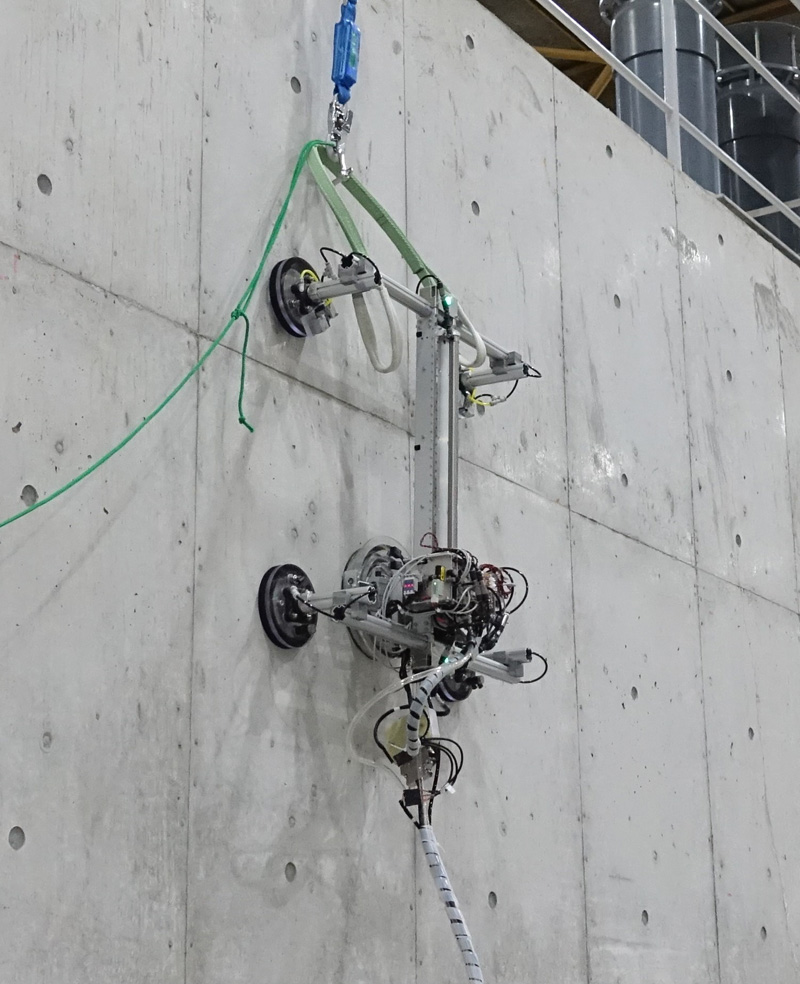
Walking type concrete inspection robot
- [1] I. Kurashige, “Novel Non-Destructive Test Method to Evaluate Air-Permeability Distribution in Depth Direction in Concrete-Development of Triple-Cell Air-Permeability Tester (TCAPT),” Proc. of the Int. Symp. Non-Destructive Testing in Civil Engineering (NDTCE 2015), 2015.
- [2] A. Nagakubo and S. Hirose, “Wall Gait: A Standard Gait for the Quadruped Wall-Climbing Robot,” Proc. of ’93 Int. Conf. on Advanced Robotics, pp. 547-552, 1993.
- [3] T. Yano, T. Suwa, M. Murakami, and T. Yamamoto, “Development of a semi self-contained wall climbing robot with scanning type suction cups,” Proc. of the 1997 IEEE/RSJ Int. Conf. on Intelligent Robot and Systems. Innovative Robotics for Real-World Applications (IROS ’97), Vol.2, pp. 900-905, 1997.
- [4] K. Yoneda, Y. Ota, K. Hirano, and S. Hirose, “Design of a light-weight wall climbing quadruped with reduced degrees of freedom,” Proc. of 4th Int. Conf. on Climbing and Walking Robots (CLAWAR), pp. 907-912, 2001.
- [5] T. Miyake, H. Ishihara, and M. Yoshimura, “Basic Studies on Wet Adhesion System for Wall Climbing Robots,” Proc. of the 2007 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, San Diego, CA, USA, pp. 1920-1925, 2007.
- [6] T. C. Apostolescu, C. Udrea, D. Duminica, G. Ionascu, L. Bogatu, L. A. Cartal, and T. Maiorescu, “Development of a Climbing Robot with Vacuum Attachment Cups,” Proc. of Int. Conf. on Innovations, Recent Trends and Challenges in Mechatronics, Mechanical Engineering and New High-Tech Products Development (MECAHITECH’11), Vol.3, pp. 258-267, 2011.
- [7] S. Kawasaki and K. Kikuchi, “Development of a Small Legged Wall Climbing Robot with Passive Suction Cups,” Proc. of the 3rd Int. Conf. on Design Engineering and Science (ICDES 2014), pp. 112-116, 2014.
- [8] S. Tokuomi and K. Mori, “Suction Cup for Concrete Wall Testing Robot,” J. Robot. Mechatron., Vol.28, No.2, pp. 194-197, 2016.
- [9] S. J. Doshi, “Design of vacuum operated wall climbing robot,” Int. J. of Advance Engineering and Research Development, Vol.4, Issue 8, pp. 513-516, 2017.
- [10] Y. Takada, Y. Tokura, Y. Matsumura, T. Tanaka, and T. Kanada, “Wall Inspection Robot with Maneuvering Assist Control System Against Crosswind,” J. Robot. Mechatron., Vol.30, No.3, pp. 416-425, 2018.
- [11] S. Tokuomi and K. Mori, “Suction Cup for Concrete Wall Testing Robot,” J. Robot. Mechatron., Vol.28, No.2, pp. 194-197, 2016.
- [12] Y. Ota, K. Yoneda, F. Ito, S. Hirose, and Y. Inagaki, “Designing and Control of 6-DOF Mechanism for Twin-Frame Mobile Robot,” Autonomous Robot, Vol.10, No.3, pp. 297-316, 2001.
- [13] M. Ushijima, “Double suction cup device,” Japanese Examined Utility Model Application Publication, No.Hei, 03-104519, 1991.
- [14] T. Kurosaki, “Portable movable simple fixed magnet clip mounted tape measure,” Japanese Registered Utility Model, No.3057495, 1999.
- [15] K. Imanishi, “Double suction cup,” Japanese Examined Utility Model Application Publication, No.Hei, 03-099211, 1991.
- [16] H. Ezawa, “Double suction cup for fixing hook and shelf,” Japanese Examined Utility Model Application Publication, No.Sho, 62-093417, 1987.
- [17] S. Watabe, “Bracing bar support,” Japanese Unexamined Utility Model Application Publication, No.2017-144206, 2017.
- [18] S. Kimura, “Suction cup,” Japanese Examined Utility Model Application Publication, No.Sho, 60-012716, 1985.
- [19] S. Wada, “Double suction cup,” Japanese Examined Utility Model Application Publication, No.Sho, 49-146376, 1974.
- [20] T. Zaitsu, “Double suction cup,” Japanese Examined Utility Model Application Publication, No.Sho, 49-008678, 1974.
- [21] M. Yamamoto, “Double suction cup,” Japanese Examined Utility Model Application Publication, No.Sho, 47-030701, 1972.
- [22] M. Kameda, “Crutch rubber for crutches,” Japanese Examined Utility Model Application Publication, No.Sho, 46-001097, 1971.
- [23] Y. Aikawa, K. Kato, T. Kato, and Y. Yoshida, “Development of an Exterior Wall Climbing Robot (Series 3) – Practical Use Model –,” Report of Fire Science Laboratory, No.30, pp. 71-80, 1993.
- [24] J. Iibushi and H. Shioda, “Double vacuum cup type self-propelled robot,” Japanese Unexamined Patent Application Publication, No.Hei, 06-190747, 1994.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.