Paper:
Development of the Biological Information Measurement System for STEM Education and High School/University Articulation
Takeshi Shimoto*, Chika Miyamoto*, and Takatoshi Umeno**
*Fukuoka Institute of Technology
3-30-1 Wajiro-higashi, Higashi-ku, Fukuoka, Fukuoka 811-0295, Japan
**University of Teacher Education Fukuoka
1-1 Akamabunkyomachi, Munakata, Fukuoka 811-4192, Japan

Development of human resources in the field of science and technology is a necessity in the modern world. To encourage the development of the nation, it is important to educate forward-thinking engineers in cooperation with the education system, with the requirements of modern society as the background of their efforts. In Western countries, STEM (Science, Technology, Engineering, and Mathematics) education is provided as a national strategy for development, and this type of education is also spreading to Japan. On the other hand, in the context of high school/university articulation, it is argued that the abilities required by high schools, universities, and society are different from one another, and that it is necessary to inter-link them. Accordingly, comprehensive content that includes all levels, from primary to higher education, is required. On the basis of this background and the current problem of STEM education and high school/university articulation, this research aims to aid in the development of a curriculum and educational study materials through which the technology of universities could be integrated into high school classes. This report includes the development of educational study material on biological information systems because it reflects the features of the department to which the authors belong and there is already a lot of research on, and technology related to, biological information. Using the educational study material, we carry out an in-class practice session including task-oriented research at a high school with cooperation from a university and discuss the educational effect that results from it.
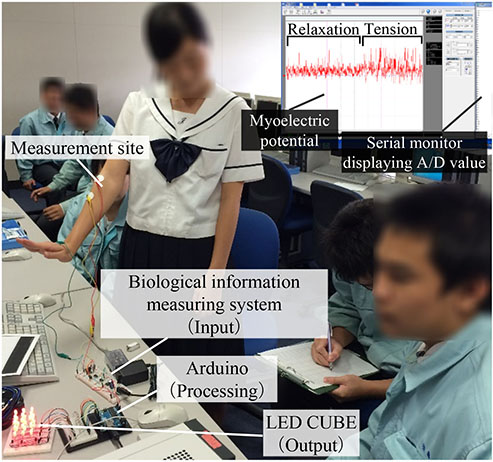
Biological information measurement system
- [1] R. W. Bybee, “What is STEM education?,” Science, Vol.329, No.5995, p. 996, 2010.
- [2] Y. Oomori, M. Isobe, T. Samukawa, and S. Yamazaki, “The Effect of the ‘Science, Technology, Engineering, Mathematics (STEM) Educational Movement’ in the Transition for Revision in ‘Design and Technology’ and ‘Computing’ in the National Curriculum in England from 2014,” J. of the Japan Society of Technology Education, Vol.56, No.4, pp. 239-250, 2014 (in Japanese).
- [3] S. Shineha, “Science Communication Training for STEM Graduate Students in the United States: Suggestions for STEM Higher Education in Japan from Report of 2014 AAAS Annual Meeting,” Japanese J. of Science Communication, No.16, pp. 45-55, 2014 (in Japanese).
- [4] H. Shirayama, H. Hosoda, K. Takeno, and T. Yamaoka, “Implementation Based on ‘a Framework for K-12 Science Education’ Concerned with Crystal Structures Models,” IEEJ Trans. on Fundamentals and Materials, Vol.136, No.10, pp. 641-648, 2016 (in Japanese).
- [5] H. Shirahama, T. Fukuyama, S. Endo, and T. Yamaoka, “The Preliminary Implementation of an Educational Program for Cooperation among Subjects in the Area of Natural Science,” J. of the Japan Society of Technology Education, Vol.58, No.1, pp. 1-9, 2016 (in Japanese).
- [6] D. Misaki and K. Arai, “Practice of School Education Using Micro Robots and Verification of its Effectiveness,” J. Robot. Mechatron., Vol.23, No.5, pp. 709-716, 2011.
- [7] T. Padir, G. S. Fischer, S. Chernova, and M. A. Gennert, “A Unified and Integrated Approach to Teaching a Two-Course Sequence in Robotics Engineering,” J. Robot. Mechatron., Vol.23, No.5, pp. 748-758, 2011.
- [8] K. Kadota, “Development of Communication Robot for STEM Education by Using Digital Fabrication,” J. Robot. Mechatron., Vol.29, No.6, pp. 944-951, 2017.
- [9] Y. Ohnishi, K. Honda, R. Nishioka, S. Mori, and K. Kawada, “Robotics Programming Learning for Elementary and Junior High School Students,” J. Robot. Mechatron., Vol.29, No.6, pp. 992-998, 2017.
- [10] T. Yaguchi, A, Ootani, Y. Wakazono, Y. Fukui, H. Arai, M. Fujiawa, and T. Waragai, “A study of the cooperation between universities and high schools,” Waseda Review of Education, Vol.24, No.1, pp. 21-44, 2010 (in Japanese).
- [11] Y. Ohtsubo, A. Ikeda, K. Ioi, and M. Kosaka, “Undergraduate-Student Teaching Materials for Mechatronics,” J. Robot. Mechatron., Vol.29, No.6, pp. 1005-1013, 2017.
- [12] K. Takano, K. Yoshino, and A. Nagasaka, “Basic research on measurement of mental work load utilizing physiological information,” Japan Society for Occupational Health, Vol.32, No.2, pp. 105-117, 1990 (in Japanese).
- [13] H. Kawamoto, H. Kadone, T. Sakurai, and Y. Sankai, “Modification of hemiplegic compensatory gait pattern by symmetry-based motion controller of HAL,” Conf. Proc. IEEE Eng. Med. Biol. Soc., pp. 4803-4807, 2015.
- [14] T. Hayashi, H. Kawamoto, and Y. Sankai, “Control Method of Robot Suit HAL Working as Operator’s Muscle Using Biological and Dynamical Information,” IROS 2005, pp. 3455-3460, 2005.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.