Paper:
Experiment Verification and Stability Analysis of Iterative Learning Control for Shape Memory Alloy Wire
Hitoshi Kino*1, Naofumi Mori*2, Shota Moribe*3, Kazuyuki Tsuda*4, and Kenji Tahara*5
*1Department of Intelligent Mechanical Engineering, Fukuoka Institute of Technology
3-30-1 Wajirohigashi, Higashi-ku, Fukuoka-shi, Fukuoka 811-0295, Japan
*2Tokyo University of Marine Science and Technology
4-5-7 Konan, Minato-ku, Tokyo 108-8477, Japan
*3Suruga Production Platform Co., Ltd.
505 Nanatsushinya, Shimizu-ku, Shizuoka, 424-8566, Japan
*4Graduate School of Engineering Science, Osaka University
1-3 Machikaneyama-cho, Toyonaka, Osaka 560-8531, Japan
*5Department of Mechanical Engineering, Kyushu University
744 Moto’oka, Nishi-ku, Fukuoka 819-0395, Japan

To achieve the control of a small-sized robot manipulator, we focus on an actuator using a shape memory alloy (SMA). By providing an adjusted voltage, an SMA wire can itself generate heat, contract, and control its length. However, a strong hysteresis is generally known to be present in a given heat and deformation volume. Most of the control methods developed thus far have applied detailed modeling and model-based control. However, there are many cases in which it is difficult to determine the parameter settings required for modeling. By contrast, iterative learning control is a method that does not require detailed information on the dynamics and realizes the desired motion through iterative trials. Despite pioneering studies on the iterative learning control of SMA, convergence has yet to be proven in detail. This paper therefore describes a stability analysis of an iterative learning control to mathematically prove convergence at the desired length. This paper also details an experimental verification of the effect of convergence depending on the variation in gain.
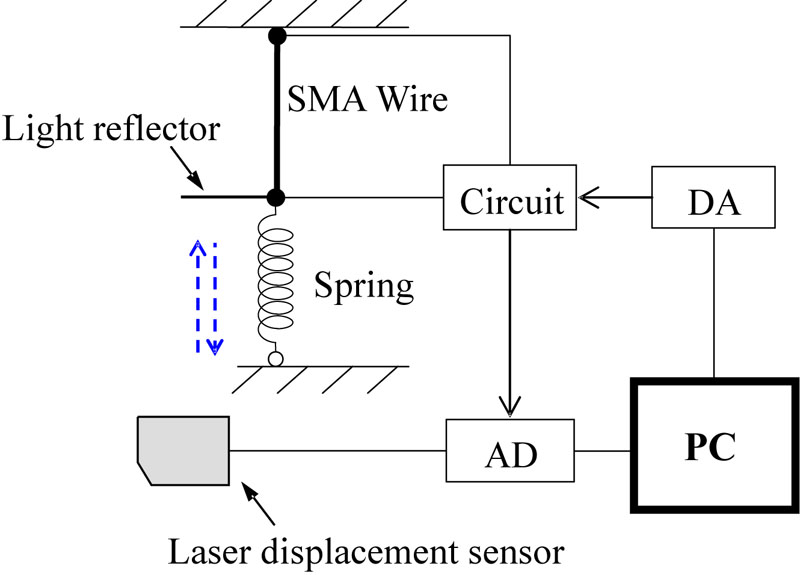
1DOF experimental system using SMA wire
- [1] K. Ikuta, M. Tsukamoto, and S. Hirose, “Shape Memory Alloy Servo Actuator System with Electric Resistance Feedback and Application for Active Endoscope,” Proc. Int. Conf. Robotics and Automation, pp. 427-430, 1988.
- [2] D. R. Madill and D. Wang, “Modeling and L2-stability of a Shape Memory Alloy Position Control System,” Trans. Control Systems Technology, Vol.6, No.4, pp. 473-481, 1998.
- [3] H. Kino and S. Kawamura, “Mechanism and Control of Parallel-Wire Driven System,” J. Robot. Mechatron., Vol.27 No.6, pp. 599-607, 2015.
- [4] X. Tang, “An Overview of the Development for Cable-Driven Parallel Manipulator,” Advances in Mechanical Engineering, Vol.2014, pp. 1-9, 2014.
- [5] K. Ikuta, “Micro/miniature shape memory alloy actuator,” Proc. Int. Conf. Robotics and Automation, pp. 2156-2161, 1990.
- [6] K. Ikuta, M. Tsukamoto, and S. Hirose, “Mathematical Model and Experimental Verification of Shape Memory Alloy for Designing Micro Actuator,” Proc. IEEE Micro Electro Mechanical Systems, pp. 103-108, 1991.
- [7] H. Cho, T. Yamamoto, Y. Takeda, A. Suzuki, and T. Sakuma, “Exploitation of shape memory alloy actuator using resistance feedback control and its development,” Progress in Natural Science: Materials Int., Vol.20, pp. 97-103, 2010.
- [8] K. Kirkpatrick and J. Valasek, “Active Length Control of Shape Memory Alloy Wires Using Reinforcement Learning,” J. Intelligent Material Systems and Structures, Vol.22, Issue 14, pp. 1595-1604, 2011.
- [9] A. Kumagai, P. Hozian, and M. Kirkland, “Neurofuzzy-model-based Feedback Controller for Shape Memory Alloy Actuators,” Proc. SPIE 3984, Smart Structures and Materials 2000: Mathematics and Control in Smart Structures, pp. 291-299, 2000.
- [10] M. H. Elahinia, T. M. Seigler, D. J. Leo, and M. Ahmadian, “Nonlinear Stress-Based Control of a Rotary SMA-Actuated Manipulator,” J. Intelligent Material Systems and Structures, Vol.15, Issue 6, pp. 495-508, 2004.
- [11] M. Elahinia, J. Koo, M. Ahmadian, and C. Woolsey, “Backstepping Control of a Shape Memory Alloy Actuated Robotic Arm,” J. Vibration and Control, Vol.11, Issue 3, pp. 407-429, 2005.
- [12] M. H. Elahinia and H. Ashrafiuon, “Nonlinear Control of a Shape Memory Alloy Actuated Manipulator,” J. Vibration and Acoustics, Vol.124, No.4, pp. 566-575, 2002.
- [13] K. Arai, S. Aramaki, and K. Yanagisawa, “Feedback Linearization for SMA,” Proc. 34th SICE Annual Conf., pp. 1383-1386, 1995.
- [14] H. Ashrafiuon and V. R. Jala, “Sliding Mode Control of Mechanical System Actuated by Shape Memory Alloy,” J. Dynamic Systems, Measurement and Control, Vol.131, 011010, 2009.
- [15] B. Selden, K. J. Cho, and H. H. Asada, “Segmented binary control of shape memory alloy actuator systems using the Peltier effect,” Proc. Int. Conf. Robotics and Automation, pp. 4931-4936, 2004.
- [16] S. Hirose, K. Ikuta, and Y. Umetani, “Development of Shape Memory Alloy Actuator,” J. Robotics Society of Japan, Vol.4, No.2, pp. 89-100, 1986 (in Japanese).
- [17] M. Moallem and J. Lu, “Application of shape memory alloy actuators for flexure control: theory and experiments,” Trans. Mechatronics, Vol.10, Issue 5, pp. 495-501, 2005.
- [18] C. A. Dickinson and J. T. Wen, “Feedback Control Using Shape Memory Alloy Actuators,” J. Intelligent Material Systems and Structures, Vol.9, Issue 4, pp. 242-250, 1998.
- [19] S. S. Ge, K. P. Tee, I. E. Vahhi, and F. E. H. Tay, “Tracking and Vibration Control of Flexible Robots Using Shape Memory Alloys,” Trans. Mechatronics, Vol.11, No.6, pp. 690-698, 2006.
- [20] J. H. Crews and R. C. Smith, “Modeling and Bayesian parameter estimation for shape memory alloy bending actuators,” Proc. of SPIE – The Int. Society for Optical Engineering, Vol.8342, 2012.
- [21] A. S. Veeramani, G. D. Buckner, S. B. Owen, R. C. Cook, and G. Bolotin, “Modeling the dynamic behavior of a shape memory alloy actuated catheter,” Smart Materials and Structures, Vol.17, No.1, 015037, 2008.
- [22] M. Shibata, T. Yoshimura, and S. Hirai, “Loosely Coupled Joint Driven by SMA Coil Actuators,” Proc. Int. Conf. Robotics and Automation, pp. 4460-4465, 2007.
- [23] E. T. Esfahani, M. H. Elahinia, and E. T. Esfahani, “Developing an Adaptive Controller for a Shape Memory Alloy Walking Assistive Device,” J. Vibration and Control, Vol.16, Issue 13, pp. 1897-1914, 2010.
- [24] K. Ikuta, T. Matsuura, and Y. Sasaki, “Learning Control of Shape Memory Alley Servo Actuator and Monitoring Fatigue,” Proc. Robotics and Mechatronics Conf., Japan Society of Mechanical Engineers, Vol.A, pp. 63-64, 1995 (in Japanese).
- [25] K. Ikuta, Y. Sasaki, and T. Matsuura, “Study on Shape Memory Alloy Servo Actuator: (No.21) Learning control of SMA Servo Actuator and Fatigue estimation,” Annual Conf. Robotics Society of Japan, pp. 161-162, 1994 (in Japanese).
- [26] K. K. Leang, S. Ashley, and G. Tchoupo, “Iterative and Feedback Control for Hysteresis Compensation in SMA,” J. Dynamic Systems, Measurement and Control, Vol.131, 014502, 2009.
- [27] M. Menon and H. H. Asada, “Iterative Learning Control of Shape Memory Alloy Actuators with Thermoelectric Temperature Regulation for Multifunctional Car Seat,” Proc. American Control Conf., pp. 935-939, 2006.
- [28] S. Arimoto, “Control Theory of Non-linear Mechanical Systems – A passivity-based and circuit-theoretic approach (Oxford Engineering Science Series 49),” Oxford University Press, 1996.
- [29] B. Kim, S. Lee, J. H. Park, and J. O. Park, “Design and fabrication of a locomotive mechanism for capsule-type endoscopes using shape memory alloys (SMAs),” Trans. Mechatronics, Vol.10, Issue 1, pp. 77-86, 2005.
- [30] T. Sato, Q. Ji, and K. Goto, “Characteristics of SMA Actuator of Knitted Structure for artificial muscle,” Trans. Japan Society of Mechanical Engineers Series C, Vol.71, No.707, pp. 2321-2327, 2005 (in Japanese).
- [31] K. J. De Laurentis and C. Mavroidis, “Mechanical design of a shape memory alloy actuated prosthetic hand,” J. Technology and Health Care, Vol.10, Issue 2, pp. 91-106, 2002.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.