Development Report:
MACROTIS: Cubic Robot with Snap-Through-Buckling Mechanisms for Achieving High Freedom of Movement
Kwanwai Mak, Koichi Osuka, Yasuhiro Sugimoto, and Teruyo Wada
Department of Mechanical Engineering, Osaka University
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan

Based on the design of an inertia-driven modular robot, this paper proposes a new design of cubic robot using snap-through-buckling mechanisms as actuators for achieving translational and rotational motion in multiple directions. Through experiments, the characteristics of the mechanism were obtained, and performance of the robot was assessed.
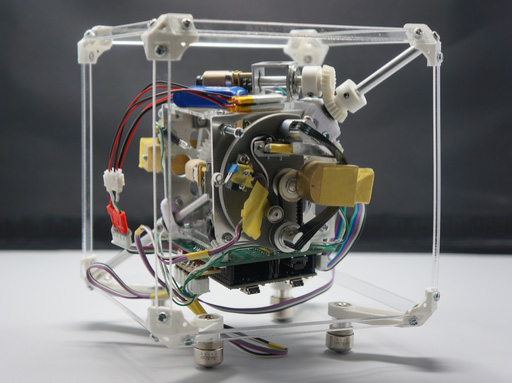
The cubic robot MACROTIS
- [1] K. Gilpin and D. Rus, “Modular robot systems,” IEEE Robotics & Automation Magazine, Vol.17, No.3, pp. 38-55, 2010.
- [2] H. Kurokawa, K. Tomita, A. Kamimura, E. Yoshida, S. Kokaji, and S. Murata, “Distributed self-reconfiguration control of modular robot m-tran,” 2005 IEEE Int. Conf. on Mechatronics and Automation, Vol.1, pp. 254-259, 2005.
- [3] J. W. Romanishin, K. Gilpin, and D. Rus, “M-blocks: Momentum-driven, magnetic modular robots,” 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 4288-4295, 2013.
- [4] T. Hirano, M. Ishikawa, and K. Osuka, “Control and development of cylindrical mobile robot,” J. Robot. Mechatron., Vol.25, No.2, pp. 392-399, 2013.
- [5] T. Yoshimitsu, T. Kubota, and I. Nakatani, “MINERVA rover which became a small artificial solar satellite,” AIAA/USU Conf. on Small Satellites, 2006.
- [6] J. Reill, H. J. Sedlmayr, P. Neugebauer, M. Maier, E. Krämer, and R. Lichtenheldt, “MASCOT – asteroid lander with innovative mobility mechanism,” 13th Symp. on Advanced Space Technologies in Robotics and Automation (ASTRA), 2015.
- [7] K. Ohgata, K. Osuka, K. Tadakuma, H. Mochiyama, and M. Bando, “On acutator unit for asteroid exploration rover using buckling phenomenon,” Proc. of the 57th Space Science and Technology Conf., JSASS-2013-4224, 2013 (in Japanese).
- [8] T. B. A. Lastrilla, K. Osuka, Y. Sueoka, and Y. Sugimoto, “Design Proposal for a Small Asteroid Surface Rover HORUS,” The 3rd Multi-Symp. on Control Systems (MSCS), 2D3-5, 2016.
- [9] A. Yamada, H. Mochiyama, and H. Fujimoto, “Statics analysis of the robotic catapults based on the closed elastica,” J. of the Robotics Society of Japan, Vol.26, No.2, pp. 169-177, 2008 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.