Paper:
Cardboard Box Depalletizing Robot Using Two-Surface Suction and Elastic Joint Mechanisms: Mechanism Proposal and Verification
Junya Tanaka and Akihito Ogawa
Corporate Research & Development Center, Toshiba Corporation
1 Komukai Toshiba-cho, Saiwai-ku, Kawasaki-shi, Kanagawa 212-8582, Japan

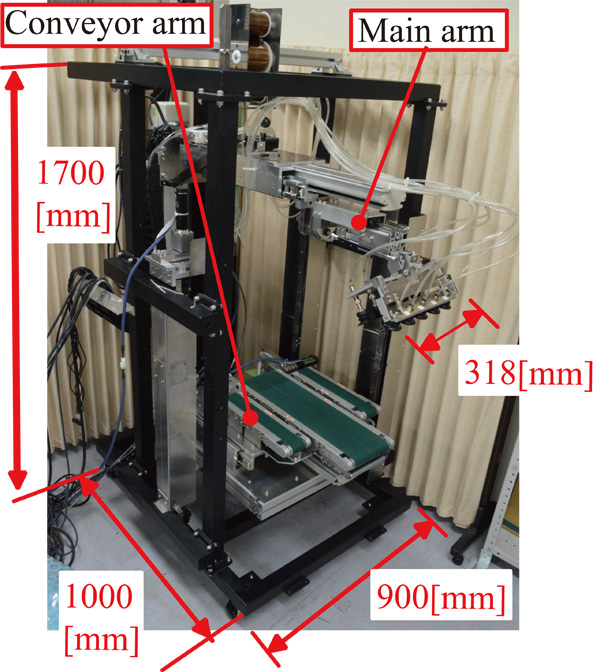
This paper proposes a new method for a depalletizing robot in distribution center to transfer cardboard boxes. Through the use of elastic joint mechanisms, the proposed method reduces the deformation and breakage of cardboard boxes as well as shifts in position and posture due to collapses of the stacks. To validate the proposed method, we developed a linear depalletizing robot that consists of a main arm that supports a vacuum suction type end effector via elastic joint mechanisms and a conveyor arm for conveying cardboard boxes. The proposed transfer method is characterized by a series of actions using the elastic joint mechanisms of the end effector to pick up and lift a cardboard box by two of its sides and then tilt and take it out of a roll box pallet on a conveyor. Tests show that the robot can successfully transfer cardboard boxes using only simple motions in spite of various changes in box position and posture, and that the new joint mechanisms operate effectively.
Cardboard box depalletizing robot
- [1] W. Echelmeyer, A. Kirchheim, and E. Wellbrock, “Robotics-logistics: Challenges for automation of logistic processes,” Proc. of IEEE Int. Conf. on Automation and Logistics 2008, pp. 2099-2103, 2008.
- [2] D. Katsoulas, L. Bergen, and L. Tassakos, “A versatile depalletizer of boxes based on range imagery,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 4313-4319, 2002.
- [3] D. K. Katsoulas and D. I. Kosmopoulos, “An efficient depalletizing system based on 2D range imagery,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 305-312, 2001.
- [4] S. Levine, P. Pastor, A. Krizhevsky, and D. Quillen, “Learning Hand-Eye Coordination for Robotic Grasping with Deep Learning and Large-Scale Data Collection,” The Int. J. of Robotics Research, Vol.37, Nos.4-5, pp. 421-436, 2018.
- [5] W. T. Townsend, “The BarrettHand grasper, programmably flexible part handling and assembly,” Industrial Robots, Vol.27, No.3, pp. 181-188, 2000.
- [6] J. Tanaka, A. Sugahara, and H. Ogawa, “Four-Fingered Robot Hand with Mechanism to Change the Direction of Movement – Mechanical Design and Basic Experiments –,” J. Robot. Mechatron., Vol.30, No.4, pp. 624-637, 2018.
- [7] H. Iwata and S. Sugano, “Design of human symbiotic robot TWENDY-ONE,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 580-586, 2009.
- [8] J. Liu, K. Tanaka, L. M. Bao, and I. Yamaura, “Analytical modelling of suction cups used for window-cleaning robots,” Vacuum, Vol.80, pp. 593-598, 2006.
- [9] F. Novotny and M. Hork, “Computer modelling of suction cups used for window cleaning robot and automatic handing of glass sheets,” Modern Machinery Science J., pp. 113-118, 2009.
- [10] S. Tokuomi and K. Mori, “Suction Cup for Concrete Wall Testing Robot,” J. Robot. Mechatron., Vol.28, No.2, pp. 194-197, 2016.
- [11] F. Tramacere, L. Beccai, F. Mattioli, E. Sinibaldi, and B. Mazzolai, “Artificial Adhesion Mechanisms inspired by Octopus Suckers,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 3846-3851, 2012.
- [12] T. Takahashi, S. Kikuchi, M. Suzuki, and S. Aoyagi, “Vacuum gripper imitated Octopus Sucker – Effect of liquid membrane for absorption –,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2929-2936, 2015.
- [13] H. Tsukagoshi, K. Fuchigami, E. Watari, and A. Kitagawa, “Deformable Anchor Ball for Thrown Referring to Octopus Suckers,” J. Robot. Mechatron., Vol.26, No.4, pp. 477-485, 2014.
- [14] H. Nakamoto, H. Eto, T. Sonoura, J. Tanaka, and A. Ogawa, “High-speed and compact depalletizing robot capable of handling packages stacked complicatedly,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 344-349, 2016.
- [15] K. Koganezawa and Y. Ishizuka, “Novel Mechanism of Artificial Finger using Double Planetary Gear System,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3184-3191, 2008.
- [16] T. Ueno and M. Oda, “Development of an Index Finger for the Dexterous Hand for Space,” J. of the Robotics Society of Japan, Vol.28, No.3, pp. 349-359, 2010 (in Japanese).
- [17] H. Stuart, S. Wang, O. Khatib, and M. R. Cutkosky, “The Ocean One hands: An adaptive design for robust marine manipulation,” The Int. J. of Robotics Research, Vol.36, No.2, pp. 150-166, 2017.
- [18] R. Fukui, T. Mori, and T. Sato, “Home-Use Object Transfer/Storage Robot System with Compliant Strategy and Mechanism (Commodities Management and its Extended Application of Daily Life Support for the Elderly),” J. Robot. Mechatron., Vol.23, No.4, pp. 532-543, 2011.
- [19] R. Haraguchi, K. Osuka, S. Makita, and S. Tadokoro, “The Development of the Mobile Inspection Robot for Rescue Activity: MOIRA 2,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 498-505, 2005.
- [20] K. Ueda, M. Guarnieri, T. Inoh, P. Debenest, R. Hodoshima, E. Fukushima, and S. Hirose, “Development of HELIOS IX: An Arm-Equipped Tracked Vehicle,” J. Robot. Mechatron., Vol.23, No.6, pp. 1031-1040, 2011.
- [21] H. Komura, H. Yamada, S. Hirose, G. Endo, and K. Suzumori, “Development of snake-like robot ACM-R8 with large and monotread wheel,” Adv. Robot., Vol.29, No.17, pp. 1081-1094, 2015.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.