Paper:
Operator-Based Robust Nonlinear Control Analysis and Design for a Bio-Inspired Robot Arm with Measurement Uncertainties
Aihui Wang*, Zhengxiang Ma**, and Jianmin Luo*
*School of Electric and Information Engineering, Zhongyuan University of Technology
41 Zhongyuan Road, Zhengzhou 450007, China
No.2, Daxue Road, Zhengzhou 450015, China

In this paper, a robust nonlinear tracking control design for a bio-inspired robot arm with human-like motion mechanism is investigated, and the bio-inspired operator controller based on human multi-joint viscoelastic properties is designed by using operator-based robust right coprime factorization approach. The motion mechanism of human multi-joint arm is used, and the measurement uncertainties of human multi-joint arm viscoelasticity are considered in designing bio-inspired operator controller. Based on the proposed design scheme, the sufficient conditions for the robust stability are derived in considering the coupling effects and measurement uncertainties, and the output tracking performance is realized. The effectiveness of the proposed design scheme was confirmed by the simulation results based on experimental data, and the time-varying estimated experimental data of human multi-joint arm viscoelasticity is used in simulation.
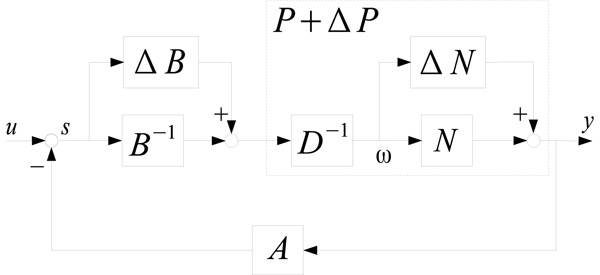
The proposed robust control scheme
- [1] P. Van der Smagt, M. Grebenstein, H. Urbanek, N. Fligge, M. Strohmayr, G. Stillfried, J. Parrish, and A. Gustus, “Robotics of human movements,” J. of Physiology-Paris, Vol.103, Nos.3-5, pp. 119-132, 2009.
- [2] S. Wittmeier, C. Alessandro, N. Bascarevic, K. Dalamagkidis, D. Devereus, A. Diamond, M. Jantsch, K. Jovanovic, R. Knight, H. G. Marques, P. Milosavljevic, B. Mitra, B. Svetozarevic, V. Potkonjak, R. Pfeifer, A. Knoll, and O. Holland, “Toward anthropomimetic robotics: development, simulation, and control of a musculoskeletal torso,” Artificial Life, Vol.19, No.1, pp. 171-193, 2014.
- [3] A. Wang, H. Yu, and S. Cang, “Bio-inspired robust control of a robot arm-and-hand system based on human viscoelastic properties,” J. of the Franklin Institute, Vol.345, No.4, pp. 1759-1783, 2017.
- [4] J. Zlotowski, D. Proudfoot, K. Yogeeswaran, and C. Bartneck, “Anthropomorphism: opportunities and challenges in human robot interaction,” Int. J. of Social Robotics, Vol.7, No.3, pp. 347-360, 2015.
- [5] F. Campos and J. Calado, “Approaches to human arm movement control-A review,” Annual Reviews in Control, Vol.33, No.1, pp. 69-77, 2009.
- [6] B. Berret, J. P. Gauthier, and C. Papaxanthis, “How humans control arm movements,” Proc. of the Steklov Institute of Mathematics, Vol.261, No.1, pp. 44-58, 2008.
- [7] M. Rahman, R. Ikeura, and K. Mizutani, “Investigation of the impedance characteristic of human arm for development of robots to cooperate with humans,” JSME Int. J. Series C, Mechanical systems, Machine Elements and Manufacturing, Vol.45, No.2, pp. 510-518, 2002.
- [8] V. Potkonjak, S. Tzafestas, D. Kostic, and G. Djordjevic, “Human-like behavior of robot arms: general considerations and the handwriting task – Part I: mathematical description of human-like motion: distributed positioning and virtual fatigue,” Robotics and Computer-Integrated Manufacturing, Vol.17, No.4, pp. 305-315, 2001.
- [9] F. Mussa-Ivaldi, N. Hogan, and E. Bizzi, “Neural, mechanical, and geometric factors subserving arm posture in humans,” J. of Neuroscience, Vol.5, No.10, pp. 2732-2743, 1985.
- [10] H. Gomi and M. Kawato, “Equilibrium-point control hypothesis examined by measured arm-stiffness during multi-joint movement,” Science, Vol.272, No.5258, pp. 117-120, 1996.
- [11] A. Wang and M. Deng, “Operator-based robust nonlinear control for a manipulator with human multi-joint arm-like viscoelastic properties,” SICE J. of Control, Measurement, and System Integration, Vol.5, No.5, pp. 296-303, 2012.
- [12] A. Wang, M. Deng, and D. Wang, “Operator-based robust control design for a human arm-like manipulator with time-varying delay measurements,” Int. J. of Control, Automation and Systems, Vol.11, No.6, pp. 1112-1121, 2013.
- [13] F. Lewis, D. Dawson, and C. Abdallah, “Robot Manipulator Control: Theory and Practice,” Marcel Dekker, Inc., 2004.
- [14] M. Deng, “Operator-based nonlinear control system design and applications,” Wiley-IEEE Press, 2012.
- [15] N. Bu and M. Deng, “Isomorphism-based robust right coprime factorization of nonlinear unstable plants with perturbations,” IET Control Theory & Applications, Vol.4, No.11, pp. 2381-2390, 2012.
- [16] M. Deng, A. Inoue, and K. Ishikawa, “Operator-based nonlinear feed-back control design using robust right coprime factorization,” IEEE Trans. on Automatic Control, Vol.51, No.4, pp. 645-648, 2006.
- [17] A. Wang and M. Deng, “Robust nonlinear multivariable tracking control design to a manipulator with unknown uncertainties using operator-based robust right coprime factorization,” Trans. of the Institute of Measurement and Control, Vol.35, No.6, pp. 788-797, 2012.
- [18] A. Wang and M. Deng, “Operator-based robust nonlinear tracking control for a human multi-joint arm-like manipulator with unknown time-varying delays,” Applied Mathematics & Information Sciences, Vol.6, No.3, pp. 459-468, 2012.
- [19] S. Wen and M. Deng, “Operator-based robust nonlinear control and fault detection for a peltier actuated thermal process,” Mathematical and Computer Modelling, Vol.57, No.1, pp. 16-29, 2013.
- [20] M. Deng, S. Bi, and A. Inoue, “Robust nonlinear control and tracking design for multi-input multi-output nonlinear perturbed plants,” IET Control Theory & Applications, Vol.3, No.9, pp. 1237-1248, 2009.
- [21] M. Deng, A. Inoue, and Q. Zhu, “An integrated study procedure on real time estimation of time varying multijoint human arm viscoelasticity,” Trans. of the Institute of Measurement and Control, Vol.33, No.8, pp. 919-941, 2011.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.