Paper:
Group Control of Mobile Robots for More Efficient Searches – Verification of Semi-Autonomous Trajectory Tracking Motions in Irregular Ground Environment –
Yoshikazu Ohtsubo* and Morihito Matsuyama**
*Faculty of Science and Engineering, Kindai University
3-4-1 Kowakae, Higashi-osaka, Osaka 577-8502, Japan
**Vstone Co., Ltd.
2-15-28 Mitejima, Nishiyodogawa-ku, Osaka 555-0012, Japan

After the occurrence of a disaster, it is critical to perform rapid and accurate searching operations in the large disaster area. It is efficient to perform such operations using multiple mobile exploration robots. Accordingly, we focus on cooperative cruising in a disaster environment and propose the trajectory tracking control method for a semi-autonomous search robot. We apply a robot operating system (ROS) to execute the trajectory tracking control using two mobile exploration robots. In this paper, we describe the trajectory tracking control using gravity potential method and the results of a cooperative cruising experiment in an uneven terrain environment.
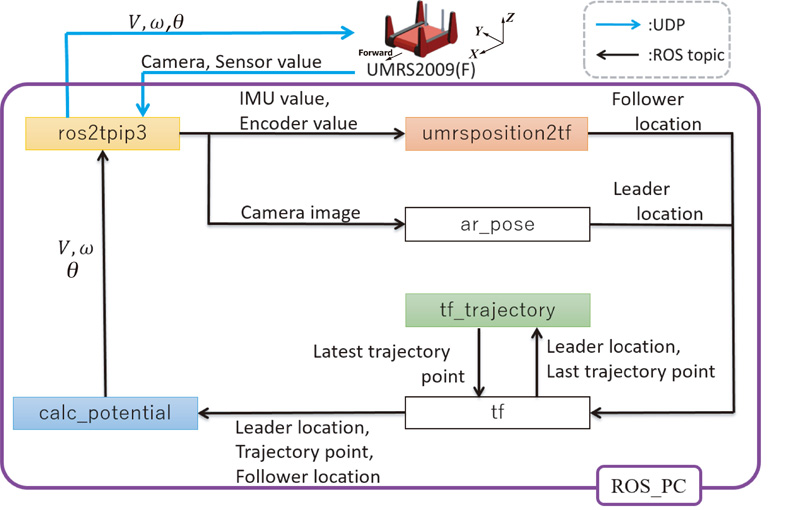
Schematic view of the ROS trajectory tracking control using two mobile exploration robots
- [1] R. Hodoshima, M. Guarnieri, R. Kurazume, H. Masuda, T. Inoh, P. Debenest, E. F. Fukushima, and S. Hirose, “HELIOS Tracked Robot Team: Mobile RT System for Special Urban Search and Rescue Operations,” J. Robot. Mechatron., Vol.23, No.6, pp. 1041-1054, 2011.
- [2] H. Kimura and G. Kajiura, “Motion Recognition Based Cooperation between Human Operating Robot and Autonomous Assistant Robot,” J. of the Robotics Society of Japan, Vol.15, No.4, pp. 624-633, 1997 (in Japanese).
- [3] M. Hara, M. Fukuda, H. Nishibayashi, Y. Aiyama, J. Ota, and T. Arai, “Motion Control of Cooperative Transportation System by Quadruped Robots Based on Vibration Model in Walking,” Proc. 1999 IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Vol.3, pp. 1651-1656, 1999.
- [4] M. Bakhshipoura, M. Jabbari Ghadib, and F. Namdari, “Swarm robotics search & rescue: A novel artificial intelligence-inspired optimization approach,” Applied Soft Computing, Vol.57, pp. 708-726, 2017.
- [5] Y. Tan et al., “Handbook of Research on Design, Control, and Modeling of Swarm Robotics,” IGI Grobal, 2016.
- [6] J. Ota and T. Arai, “Motion Planning of Multiple Robots Using Virtual Impedance,” J. of the Robotics Society of Japan, Vol.11, No.7, pp. 1039-1046, 1993 (in Japanese).
- [7] M. Yuasa and I. Mizuuchi, “A Control Method for a Swarm of Plant Pot Robots that Uses Artificial Potential Fields for Effective Utilization of Sunlight,” J. Robot. Mechatron., Vol.26, No.4, pp. 505-512, 2014.
- [8] H. Asama, “Special Issue on Distributed Robotics Systems,” J. Robot. Mechatron., Vol.8, No.5, p. 395, 1996.
- [9] S. Mori and T. Namerikawa, “Formation Control Considering Disconnection of Network Links for a Multi-UAV System: An LMI Approach,” J. of Robotics Research, Vol.28, No.3, pp. 343-350, 2016.
- [10] M. F. B. Abas, D. Pebrianti, S. A. M. Ali, D. Iwakura, Y. Song, K. Nonami, and D. Fujiwara, “Circular Leader-Follower Formation Control of Quad-Rotor Aerial Vehicles,” J. Robot. Mechatron., Vol.25, No.1, pp. 60-71, 2013.
- [11] S. A. Kumar, J. Vanualailai, and B. Sharma, “Lyapunov-Based Control for a Swarm of Planar Nonholonomic Vehicles,” Mathematics in Computer Science, Vol.9, No.4, pp. 461-475, 2015.
- [12] D. Kurabayashi, T. Choh, J. Cheng, and T. Funato, “Adaptive Formation Transition of a Swarm of Mobile Robots Based on Phase Gradient,” J. Robot. Mechatron., Vol.22, No.4, pp. 467-474, 2010.
- [13] P. Kim and D. Kurabayashi, “Efficient Formation of Pheromone Potential Field by Filtering Interaction,” J. Robot. Mechatron., Vol.24, No.4, pp. 561-567, 2011.
- [14] M. Dorigo, D. Floreano, L. M. Gambardella et al., “Swarmnoid: a novel concept for the study of heterogeneous robotic swarms,” IEEE Robotics and Automation Magazine, Vol.20, No.4, pp. 60-71, 2013.
- [15] R. Groß, M. Bonani, F. Mondada, M. Dorigo et al., “Autonomous Self-assembly in a Swarm-bot,” Int. Symp. on Autonomous Minirobots for Research and Edutainment, (AMiRE 2005), pp. 314-322, 2006.
- [16] G. Pini, A. Brutschy, M. Frison et al.,“Task partitioning in swarms of robots : an adaptive method for strategy selection,” Swarm Intelligence, Vol.5, Issues 3-4, pp. 283-304, 2011.
- [17] H. Darweesh, E. Takeuchi, K. Takeda, Y, Ninomiya, A. Sujiwo, L. Y. Morales, N. Akai, T. Tomizawa, and S. Kato, “Open Source Integrated Planner for Autonomous Navigation in Highly Dynamic Environments,” J. Robot. Mechatron., Vol.29, No.4, pp. 668-684, 2017.
- [18] D. Helmick, A. Angelova, and L. Matthies, “Terrain Adaptive Navigation for planetary rovers,” J. of Field Robotics, Vol.26, No.4, pp. 391-410, 2009.
- [19] A. D. Dang and J. Horm, “Formation Control of Autonomous Robots Following Desired Formation During Tracking a Moving Target,” IEEE Int. Conf. Cybernetics, Vol.2, pp. 160-165, 2015.
- [20] Y. Miura, S. Hanaki, and F. Matsuno, “Construction of ant behavioral model and validation of division of labor in swarm,” 12th SICE SI2011 Annual Conf., 1F3-3, 2011 (in Japanese).
- [21] O. Khatib, “Real-Time Obstacle Avoidance for Manipulators and Mobile Robots,” Int. J. of Robotics Research, Vol.5, No.1, pp. 90-98, 1986.
- [22] Y. Koren and J. Borenstein, “Potential Field Methods and Their Inherent Limitations for Mobile Robot Navigation,” Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 1398-1404, 1991.
- [23] K. Sato, “Global Motion Planning using a Laplacian Potential Field,” J. of the Robotics Society of Japan, Vol.11, No.5, pp. 702-709, 1993 (in Japanese).
- [24] K. Sato, “Deadlock-free motion planning using the Laplace potential field,” Advanced Robotics, Vol.7, No.5, pp. 449-461, 1993.
- [25] T. Shimizu, A. Tamashita, and T. Kaneko, “Mobile Robot System Realizing Human Following and Autonomous Returning with Obstacle Avoidance,” 2010 JSME Conf. on Robotics and Mechatronics, 2A2-B04, 2010 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.