Paper:
Low-Altitude and High-Speed Terrain Tracking Method for Lightweight AUVs
Toshihiro Maki*, Yukiyasu Noguchi*, Yoshinori Kuranaga*, Kotohiro Masuda*, Takashi Sakamaki*, Marc Humblet**, and Yasuo Furushima***
*Institute of Industrial Science, The University of Tokyo
4-6-1 Komaba, Meguro-ku, Tokyo 153-8505, Japan
**Department of Earth and Planetary Sciences, Nagoya University
Furo-cho, Chikusa-ku, Nagoya 464-8601, Japan
***Japan Agency for Marine-Earth Science and Technology
2-15 Natsushima, Yokosuka, Kanagawa 237-0061, Japan

This paper proposes a new method for cruising-type autonomous underwater vehicles (AUVs) to track rough seafloors at low altitudes while also maintaining a high surge velocity. Low altitudes are required for visual observation of the seafloor. The operation of AUVs at low altitudes and high surge velocities permits rapid seafloor imaging over a wide area. This method works without high-grade sensors, such as inertial navigation systems (INS), Doppler velocity logs (DVL), or multi-beam sonars, and it can be implemented in lightweight AUVs. The seafloor position is estimated based on a reflection intensity map defined on a vertical plane, using measurements from scanning sonar and basic sensors of depth, attitude, and surge velocity. Then, based on the potential method, a reference pitch angle is generated that allows the AUV to follow the seafloor at a constant altitude. This method was implemented in the AUV HATTORI, and a series of sea experiments were carried out to evaluate its performance. HATTORI (Highly Agile Terrain Tracker for Ocean Research and Investigation) is a lightweight and low-cost testbed designed for rapid and efficient imaging of rugged seafloors, such as those containing coral reefs. The vehicle succeeded in following a rocky terrain at an altitude of approximately 2 m with a surge velocity of approximately 0.8 m/s. This paper also presents the results of sea trials conducted at Ishigaki Island in 2017, where the vehicle succeeded in surveying the irregular, coral-covered seafloor.
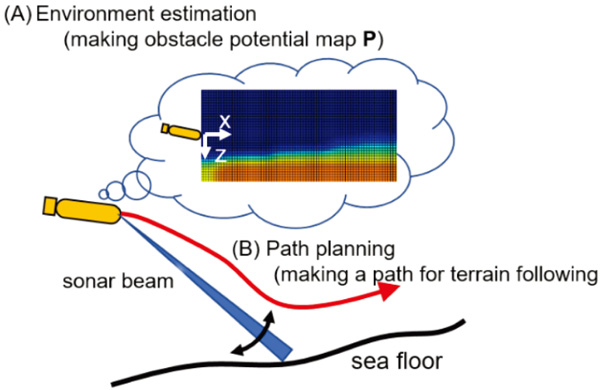
Concept of the proposed method
- [1] B. Bingham et al., “Robotic Tools for Deep Water Archaeology: Surveying an Ancient Shipwreck with an Autonomous Underwater Vehicle,” J. of Field Robotics, Vol.27, No.6, pp. 702-717, 2010.
- [2] T. Maki, A. Kume and T. Ura, “Volumetric mapping of tubeworm colonies in Kagoshima Bay through autonomous robotic surveys,” Deep Sea Research Part I: Oceanographic Research Papers, Vol.58, No.7, pp. 757-767, 2011.
- [3] Y. Nishida et al., “Autonomous Underwater Vehicle “BOSS-A” for Acoustic and Visual Survey of Manganese Crusts,” J. Robot. Mechatron., Vol.28, No.1, pp. 91-94, 2016.
- [4] S. B. Williams et al., “Monitoring of Benthic Reference Sites Using an Autonomous Underwater Vehicle,” IEEE Robotics & Automation Magazine, Vol.19, No.1, pp. 73-84, 2012.
- [5] M. Johnson-Roberson et al., “High-Resolution Underwater Robotic Vision-Based Mapping and Three-Dimensional Reconstruction for Archaeology,” J. of Field Robotics, Vol.34, No.4, pp. 625-643, 2017.
- [6] Y. Nishida et al., “Underwater Platform for Intelligent Robotics and its Application in Two Visual Tracking Systems,” J. Robot. Mechatron., Vol.30, No.2, pp. 238-247, 2018.
- [7] T. Maki et al., “AUV Tri-TON 2: An intelligent platform for detailed survey of hydrothermal vent fields,” 2014 IEEE/OES Autonomous Underwater Vehicles (AUV), 2014.
- [8] V. H. Fernandes, A. A. Neto, and D. D. Rodrigues, “Pipeline inspection with AUV,” 2015 IEEE/OES Acoustics in Underwater Geosciences Symp. (RIO Acoustics), 2015.
- [9] Y. Nishida et al., “Autonomous Underwater Vehicle “Tuna-Sand” for Image Observation of the Seafloor at a Low Altitude,” J. Robot. Mechatron., Vol.26, No.4, pp. 519-521, 2014.
- [10] T. Maki et al., “Low altitude tracking of rugged seafloors for autonomous visual observation,” 2007 Symp. on, Underwater Technology and Workshop on Scientific Use of Submarine Cables and Related Technologies, pp. 488-494, 2007.
- [11] T. Maki et al., “AUV HATTORI: a Lightweight Platform for High-speed Low-altitude Survey of Rough Terrains,” OCEANS 2017 MTS/IEEE Anchorage, 2017.
- [12] S. McPhail, M. Furlong, and M. Pebody, “Low-altitude terrain following and collision avoidance in a flight-class autonomous underwater vehicle,” Proc. of the Institution of Mechanical Engineers Part M: J. of Engineering for the Maritime Environment, Vol.224, No.4, pp. 279-292, 2010.
- [13] K. J. Morris et al., “A new method for ecological surveying of the abyss using autonomous underwater vehicle photography,” Limnology and Oceanography-Methods, Vol.12, No.11, pp. 795-809, 2014.
- [14] S. M. Schillai et al., “Evaluation of Terrain Collision Risks for Flight Style Autonomous Underwater Vehicles,” 2016 IEEE/OES Autonomous Underwater Vehicles (AUV), pp. 311-318, 2016.
- [15] Y. Noguchi, Y. Kuranaga, and T. Maki, “Adaptive navigation of a high speed autonomous underwater vehicle using low cost sensors for low-altitude survey,” 2017 IEEE Underwater Technology (UT), 2017.
- [16] F.-G. Ding et al., “AUV local path planning based on virtual potential field,” 2005 IEEE Int. Conf. Mechatronics and Automations, Vol.4, pp. 1711-1716, 2005.
- [17] V. Ganesan, M. Chitre, and E. Brekke, “Robust underwater obstacle detection and collision avoidance,” Autonomous Robots, Vol.40, No.7, pp. 1165-1185, 2016.
- [18] H. Kondo et al. “Relative navigation of an autonomous underwater vehicle using a light-section profiling system,” 2004 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Vol.2, pp. 1096-1102, 2004.
- [19] M. Euston et al., “A Complementary Filter for Attitude Estimation of a Fixed-Wing UAV,” 2008 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Vol.1-3, pp. 340-345, 2008.
- [20] The Ministry of the Environment, “Coral Reefs of Japan,” The Ministry of the Environment, 2004.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.