Paper:
Reducing Lumbar Load with Active Corset
Michihiro Yoshida*, Takayuki Tanaka*, Yoshio Tsuchiya**, and Takashi Kusaka*
*Hokkaido University
Kita 14, Nishi 9, Kita-ku, Sapporo, Hokkaido 060-0814, Japan
**National Institute of Technology, Tomakomai College
443 Nishikioka, Tomakomai, Hokkaido 059-1275, Japan

This study describes the effect of Active Corset on the lumbar spine. Active Corset is assist tools used to prevent low back pain. It tightens the waist optimally according to the lumbar load during work. This study aimed to clarify the mechanical effect of tightening of the pelvis on lumbar joints and determine the mechanism leading to reduction of the lumbar load. Moreover, this study examined the phenomena commonly occurring among the subjects with reduced lumbar load by tightening of the pelvis. First, we will present some examples of currently used assist tools and demine the utility of the Active Corset among the various tools used. Next, the mechanism of the Active Corset will be described. Further, we will present a hypothesis about reducing the lumbar load by tightening the pelvis. After describing the change in the joint bending angle on tightening, we will describe reduction of burden from the antigravity torque around the lumbar joint. Finally, we will compare active tightening using Active Corset with tightening using a constant force and describe the advantage of active tightening.
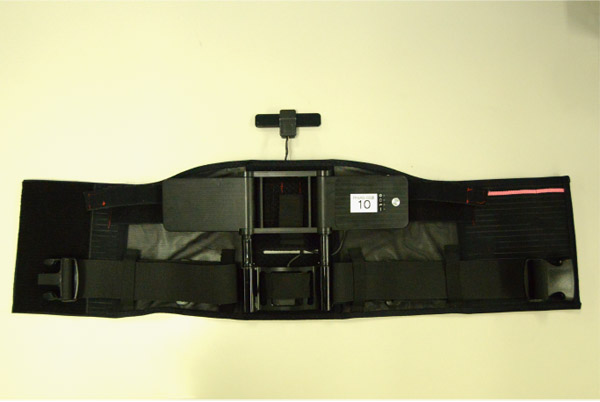
Active corset
- [1] E. Chousa, N. Tajima, M. Matusmoto, H. Kuroki, and K. Goto, “An epidemiological study of occupational low back pain,” Japanese Society of Lumbar Spine Disorders, Vol.7, No.1, 2001 (in Japanese).
- [2] Y. Imamura, T. Tanaka, Y. Suzuki, K. Takizawa, and M. Yamanaka, “Motion-Based-Design of Elastic Material for Passive Assistive Device Using Musculoskeletal Model,” J. Robot. Mechatron., Vol.23, No.6, pp. 978-990, 2011.
- [3] H. Kawamoto, S. Lee, S. Kanbe, and Y. Sankai, “Power Assist Method for HAL-3 using EMG-based Feedback Controller,” IEEE Int. Conf. on Systems, Man and Cybernetics, pp. 1648-1653, 2003
- [4] H. Kawamoto and Y. Sankai, “Power Assist System HAL-3 for Gait Disorder Person,” Computers Helping People with Special Needs, ICCHP 2002. Lecture Notes in Computer Science, Vol.2398, pp. 196-203.
- [5] H. Kobayashi, T. Matsushita, Y. Ishida, and K. Kikuchi, “New Robot Technology Concept Applicable to Human Physical Support – The Concept and Possibility of the Muscle Suit (Wearable Muscular Support Apparatus) –,” J. Robot. Mechatron., Vol.14, No.1, pp. 46-53, 2002.
- [6] H. Kobayashi and H. Suzuki, “Development of a New Shoulder Mechanism for a Muscle Suit,” Intelligent Robots and Systems, 2005.
- [7] H. Hara and Y. Sankai, “Evaluation of HAL for Lumbar Support by 3D Skeletal Model,” Trans. of the Japanese Society for Medical and Biological Engineering, Vol.50, No.1, pp. 111-116, 2012 (in Japanese).
- [8] H. Kobayashi, T. Aida, and T. Hashimoto, “Muscle Suit Development and Factory Application,” Int. J. Automation Technol., Vol.3, No.6, pp. 709-715, 2009.
- [9] C. Richardson et al., “Therapeutic exercise for lumbopelvic stabilization: a motor control approach for the treatment and prevention of low back pain,” Igaku Shoin, 2008 (in Japanese).
- [10] Y. Lee and C. Chen, “Belt effects on lumbar sagittal angles,” Clinical Biomechanics, Vol.15, pp. 790-82, 2000.
- [11] J. M. A. Mens, L. Damen, C. J. Snijders, and H. J. Stam, “The mechanical effect of a pelvic belt in patients with pregnancy-related pelvic pain,” Clinic Biomechanics, Vol.21, pp. 122-127, 2006.
- [12] J. Oh, “Effects of Pelvic Belt on Hip Extensor Muscle EMG Activity during Prone Hip Extension in Females with Chronic Low Back Pain,” J. of Physical Therapy Science, Vol.26, No.7, pp. 1023-1024, 2004.
- [13] S. Ando, T. Tanaka, H. Nara, and K. Takizawa, “A proposal for a model of change of maximum isometric muscle force in step-change workload,” J. Robot. Mechatron., Vol.25, No.6, pp. 1050-1059, 2013.
- [14] Y. Imamura, T. Tanaka, Y. Suzuki, K. Takizawa, and M. Yamanaka, “Analysis of Trunk Stabilization Effect by Passive Power-Assist Device,” J. Robot. Mechatron., Vol.26, No.6, pp. 791-798, 2014.
- [15] Y. Tsuchiya, T. Kusaka, T. Tanaka, Y. Matsuo, M. Oda, T. Sasaki, T. Kamishima, and M. Yamanaka, “Calibration method for lumbosacral dimensions in wearable sensor system of lumbar alignment,” Engineering in Medicine and Biology Society, 2015.
- [16] Y. Tsuchiya, T. Kusaka, T. Tanaka, and Y. Matsuo, “Wearable sensor system for lumbosacral load estimation by considering the effect of external load,” Advances in Human Factors in Wearable Technologies and Game Design, pp. 160-168, 2017.
- [17] A. L. Nachemson, “The lumbar spine,” an ortho-paedic challenge Spine, Vol.1, Issue 1, pp. 59-71, 1976.
- [18] M. Ae, H. Tang, and T. Yokoi, “Estimation of Inertia Properties of the Body Segments in Japanese Athletes,” Biomechanisms, Vol.11, pp. 23-33, 1992 (in Japanese).
- [19] P. Roussoly and J. L. Pinheiro-Franco, “Biomechanical analysis of the spino-pelvic organization and adaptation in pathology,” European Spine J., 2011.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.