Paper:
Teaching-Playback Navigation Without a Consistent Map
Naoki Akai*, Luis Yoichi Morales*, and Hiroshi Murase**
*Institute of Innovation for Future Society (MIRAI), Nagoya University
Furo-cho, Chikusa, Nagoya 464-8601, Japan
**Graduate School of Information Science, Nagoya University
Furo-cho, Chikusa, Nagoya 464-8603, Japan

This paper presents a teaching-playback navigation method that does not require a consistent map built using simultaneous localization and mapping (SLAM). Many open source projects related to autonomous navigation including SLAM have been made available recently; however, autonomous mobile robot navigation in large-scale environments is still difficult because it is difficult to build a consistent map. The navigation method presented in this paper uses several partial maps to represent an environment map. In other words, the complex mapping process is not necessary to begin autonomous navigation. In addition, the trajectory that the robot travels in the mapping phase can be directly used as a target path. As a result, teaching-playback autonomous navigation can be achieved without any off-line processes. We tested the navigation method using log data taken in the environment of the Tsukuba Challenge and the testing results show its performance. We provide source code for the navigation method, which includes modules required for autonomous navigation (https://github.com/NaokiAkai/AutoNavi).
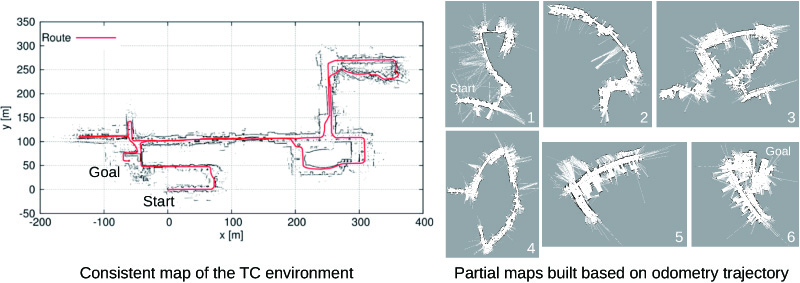
The partial maps are used for the navigation
- [1] S. Kato, E. Takeuchi, Y. Ishiguro, Y. Ninomiya, K. Takeda, and T. Hamada, “An open approach to autonomous vehicles,” IEEE Micro, Vol.35, No.6, pp. 60-69, 2015.
- [2] A. Watanabe, D. Endo, G. Yamauchi, and K. Nagatani, “Neonavigation meta-package: 2-D/3-DOF seamless global-local planner for ROS – Development and field test on the representative offshore oil plant,” Proc. IEEE SSRR, pp. 86-91, 2016.
- [3] G. Grisetti, C. Stachniss, and W. Burgard, “Improved techniques for grid mapping with rao-blackwellized particle filters,” IEEE TRO, Vol.23, No.1, pp. 34-46, 2007.
- [4] S. Kohlbrecher, O. Stryk, J. Meyer, and U. Klingauf, “A flexible and scalable SLAM system with full 3D motion estimation,” Proc. IEEE SSRR, 2011.
- [5] R. Mur-Artal, J. M. M. Montiel, and J. D. Tardös, “ORB-SLAM: a versatile and accurate monocular SLAM system,” IEEE TRO, Vol.31, No.5, pp. 1147-1163, 2015.
- [6] W. Hess, D. Kohler, H. Rapp, and D. Andor, “Real-time loop closure in 2D LIDAR SLAM,” Proc. IEEE ICRA, pp. 1271-1278, 2016.
- [7] E. Takeuchi and T. Tsubouchi, “A 3-D scan matching using improved 3-D normal distributions transform for mobile robotic mapping,” Proc. IEEE/RSJ IROS, pp. 3068-3073, 2006.
- [8] Tsukuba Challenge Technical Reports 2016 (in Japanese).
- [9] Tsukuba Challenge Technical Reports 2017 (in Japanese).
- [10] Y. Hara, T. Tsubouchi, and A. Oshima, “Rao-Blackwellized Particle Filter SLAM considering previous data with probabilistically accumulated scan shapes,” Trans. of the JSME, Series C, Vol.82, No.834, pp. 15-00421-15-00421, 2016 (in Japanese).
- [11] M. Magnusson, “The three-dimensional normal-distributions transform – an efficient representation for registration, surface analysis, and loop detection,” Ph.D. Dissertation, Örebro University, 2009.
- [12] M. Tomono, “A scan matching method using Euclidean invariant signature for global localization and map building,” Proc. IEEE ICRA, pp. 866-871, 2004.
- [13] K. Irie and M. Tomono, “A compact and portable implementation of graph-based SLAM,” Proc. ROBOMECH, 2P2-B01, 2017.
- [14] S. Thrun, W. Burgard, and D. Fox, “Probabilistic robotics,” MIT Press, 2005.
- [15] J. Gutmann and D. Fox, “An experimental comparison of localization methods continued,” Proc. IEEE/RSJ IROS, pp. 454-459, 2002.
- [16] N. Akai, K. Inoue, and K. Ozaki, “Autonomous navigation based on magnetic and geometric landmarks on environmental structure in real world,” J. of Robotics and Mechatronics, Vol.26, No.2, pp. 158-165, 2014.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.