Paper:
Developing a Remotely Operated Portable Mobile Robot
Tetsuo Tomizawa*, Masato Shibuya*, Ryodo Tanaka**, and Takeshi Nishida**
*National Defense Academy of Japan
1-10-20 Hashirimizu, Yokosuka, Kanagawa 239-8686, Japan
**Kyushu Institute of Technology
1-1 Sensuicho, Tobata-ku, Kikakyushu, Fukuoka 804-8550, Japan

The Tsukuba Challenge is one of the few technical events where it is permitted to conduct demonstrations of autonomous mobile robots on a public road in a city. Thus, when limited trial runs are available several times per year, domestic and foreign teams must bring robots to the venue and conduct experiments using robots and observation instruments. For a team located far away from the venue, the cost of transporting equipment and staff each time becomes prohibitive. In this research, to reduce the cost of transporting robots and personnel, we design and develop a mobile robot platform that is easy to transport and deploy. Additionally, to allow remote experts to generate maps and routes without visiting the site, we construct a remote operating system that operates over the internet. In this paper, we describe the portable mobile robot platform and the software configuration needed for remote operation. Then, we report the results of our verification test.
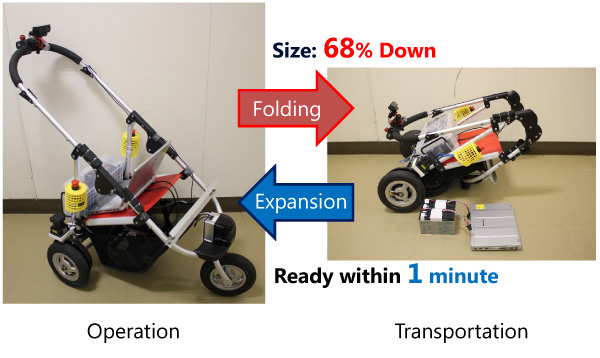
Portable mobile robot platform
- [1] T. Tomizawa, S. Muramatsu, M. Sato, M. Hirai, S. Kudoh, and T. Suehiro, “Development of an Intelligent Senior-Car in a Pedestrian Walkway,” Advanced Robotics, Vol.26, No.14, pp. 1577-1602, 2012.
- [2] A. Sujiwo, T. Ando, E. Takeuchi, Y. Ninomiya, and M. Edahiro, “Monocular Vision-Based Localization Using ORB-SLAM with LIDAR-Aided Mapping in Real-World Robot Challenge,” J. of Robotics and Mechatronics, Vol.28, No.4, pp. 479-490, 2016.
- [3] J. Eguchi and K. Ozaki, “Development of Autonomous Mobile Robot Based on Accurate Map in the Tsukuba Challenge 2014,” J. of Robotics and Mechatronics, Vol.27, No.4, pp. 346-355, 2015.
- [4] K. Okawa, “Three Tiered Self-Localization of Two Position Estimation Using Three Dimensional Environment Map and Gyro-Odometry,” J. of Robotics and Mechatronics, Vol.26, No.2, pp. 196-203, 2014.
- [5] K. Ohno, S. Tadokoro, K. Nagatani, E. Koyanagi, and T. Yoshida, “Trials of 3-d map construction using the tele-operated tracked vehicle kenaf at disaster city,” Proc. of the 2010 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 2864-2870, 2010.
- [6] A. Watanabe, D. Endo, G. Yamauchi, and K. Nagatani, “Neonavigation meta-package: 2-D/3-DOF seamless global-local planner for ROS – Development and field test on the representative offshore oil plant,” Proc. of the 2016 IEEE Int. Symposium on Safety, Security, and Rescue Robotics (SSRR), pp. 86-91, 2016.
- [7] K. Nagatani et al., “Redesign of rescue mobile robot Quince,” Proc. of the 2011 IEEE Int. Symposium on Safety, Security, and Rescue Robotics (SSRR), pp. 13-18, 2011.
- [8] A. Kristoffersson, S. Coradeschi, and A. Loutfi, “A Review of Mobile Robotic Telepresence,” Advances in Human-Computer Interaction, No.3, Article ID 902316, 2013.
- [9] S. Maeyama, S. Yuta, and A. Harada, “Remote Viewing on the Web using Multiple Mobile Robotic Avatars,” Proc. of the 2001 IEEE/RSJ Int. Conf. on Intelligent Robots, pp. 637-642, 2001.
- [10] S. Muramatsu, T. Tomizawa, S. Kudoh, and T. Suehiro, “Mobile Robot Navigation Utilizing the WEB Based Aerial Images Without Prior Teaching Run,” J. of Robotics and Mechatronics, Vol.29, No.7, pp. 196-203, 2014.
- [11] A. Suzuki, H. Date, K. Shigematsu, R. Mitsudome, A. Ohya, and T. Tsubouchi, “Mobile Robot Navigation Using Metric Route Information and SLAM,” Proc. of the 21th Robotics Symposia, pp. 256-261, 2016 (in Japanese).
- [12] N. Diolaiti and C. Melchiorri, “Tele-Operation of a Mobile Robot Through Haptic Feedback,” Proc. of the 2002 IEEE Int. Workshop on Haptic virtual and their applications, pp. 67-72, 2002.
- [13] C. W. Nielsen, M. A. Goodrich, and R. W. Ricks, “Ecological interfaces for improving mobile robot teleoperation,” IEEE Trans. on Robotics, Vol.23, No.5, pp. 927-941, 2007.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.