Paper:
Semi-Autonomous Multi-Legged Robot with Suckers to Climb a Wall
Asuki Saito*, Kazuki Nagayama*, Kazuyuki Ito*, Takeo Oomichi**, Satoshi Ashizawa**, and Fumitoshi Matsuno***
*Hosei University
3-7-2 Kajinocho, Koganei, Tokyo 184-8584, Japan
**Meijo University
1-501 Shiogamaguchi, Tempaku-ku, Nagoya 468-8502, Japan
***Kyoto University
C3 Building, Kyodai-katsura, Nishigyo-ku, Kyoto 615-8540, Japan

In recent years, the maintenance and inspection of old buildings have become important tasks for robots. Such robots are also expected to be used for search and rescue missions in the case of disasters. In our previous work, we developed a multi-legged robot for such tasks. In the current work, we focused on the task of climbing a vertical wall. We improved our previous robot and developed a flexible leg with a sucker to climb a wall.
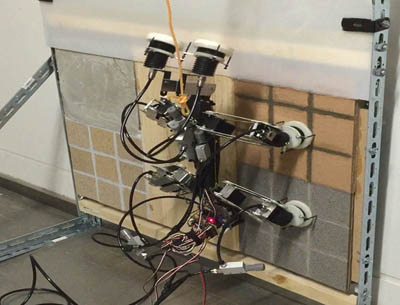
UrarakaⅡ-wall climbing robot
- [1] Y. Fujino, “Innovative Technologies for Infrastructure Management,” J. of The Society of Instrument and Control Engineers, Vol.55, No.2, pp. 117-122, 2016 (in Japanese).
- [2] S. M. Madanat, P. L. Durango, and V. M. Guillaumot, “Inspection, prediction and decision-making in infrastructure management: Framework, models and computation,” J. of Japan Society of Civil Engineers, Vol.2003, No.744, pp. 1-10, 2003.
- [3] P. Kriengkomol, K. Kamiyama, M. Kojima, M. Horade, Y. Mae, and T. Arai, “A new close-loop control method for an inspection robot equipped with electropermanent-magnets,” J. of Robotics and Mechatronics, Vol.28, No.2, pp. 185-193, 2016.
- [4] C. Theeravithayangkura, T. Takubo, K. Ohara, Y. Mae, and T. Arai, “Adaptive gait for dynamic rotational walking motion on unknown non-planar terrain by limb mechanism robot ASTERISK,” J. of Robotics and Mechatronics, Vol.25, No.1, pp. 172-182, 2013.
- [5] W. Lee and S. Hirose, “Contacting surface-transfer control for reconfigurable wall-climbing robot Gunryu III,” J. of Robotics and Mechatronics, Vol.25, No.3, pp. 439-448 2013.
- [6] F. Matsuno and Y. Uo, “Current trends in research and development of rescue robot systems,” J. of The Institute of Electrical Engineers of Japan, Vol.129, No.4, pp. 232-236, 2009.
- [7] R. R. Murphy, “International cooperation in deploying robots for disasters: Lessons for the future from the Great East Japan Earthquake,” J. of the Robotics Society of Japan, Vol.32, No.2, pp. 104-109, 2014.
- [8] R. R. Murphy, “Navigational and mission usability in rescue robots,” J. of the Robotics Society of Japan, Vol.28, No.2, pp. 142-146, 2010.
- [9] S. Tadokoro, “Technical challenge of rescue robotics,” J. of the Robotics Society of Japan, Vol.28, No.2, pp. 134-137, 2010.
- [10] S. H. Collins, M. Wisse, and A. Ruina, “A Three-Dimensional Passive-Dynamic Walking Robot with Two Legs and Knees,” The Int. J. of Robotics Research, Vol.20, No.7, pp. 607-615, 2001.
- [11] R. Pfeifer and F. Iida, “Morphological computation: Connecting body, brain, and environment,” Creating Brain-Like Intelligence, Vol.5436, pp. 66-83, 2009.
- [12] C. Paul, “Morphological computation: A basis for the analysis of morphology and control requirements,” Robotics and Autonomous Systems, Vol.54, Issue 8, pp. 619-630, 2006.
- [13] H. Hauser, A. Ijspeert, R. Füchslin, R. Pfeifer, and W. Maass, “The role of feedback in morphological computation with compliant bodies,” Biological Cybernetics, Springer Berlin / Heidelberg, Vol.106, pp. 595-613, 2012.
- [14] D. N. Lee and D. S. Young, “Visual timing of interceptive action,” D. J. Ingle et al. (Eds.), Brain Mechanisms and Spatial Vision, Kluwer Academic Publishers, 1985.
- [15] M. T. Turvey, “Dynamic Touch,” American Psychologist, Vol.51, No.11, pp. 1134-1152, 1996.
- [16] H. Kloos and E. L. Amazeen, “Perceiving heaving by dynamic touch: An investigation of the size-weight illusion in preschoolers,” British J. of Developmental Psychology, Vol.20, pp. 171-183, 2002.
- [17] K. Ito and Y. Fukumori, “Autonomous control of a snake-like robot utilizing passive mechanism,” Proc. of the 2006 IEEE Int. Conf. on Robotics and Automation Orlando, Florida, May 2006.
- [18] Y. Sato and K. Ito, “Semi-autonomous modular robot for maintenance and inspection,” Proc. of the 12th Int. Conf. on Autonomic and Autonomous Systems (ICAS2016), Lisbon, Portugal, pp. 1-3, June 26-30, 2016.
- [19] H. Maruyama and K. Ito, “Semi-autonomous snake-like robot for search and rescue,” Advanced Robotics, Vol.30, Issue 7, pp. 489-503, 2016.
- [20] Y. Kawai, K. Ito, and H. Aoki, “Passive stabilizing mechanism for snake-like rescue robot,” Proc. of 13th Int. Conf. on Control, Automation, Robotics and Vision (ICARCV 2014), Marina Bay Sands Singapore, pp. 1740-1745, December 10-12, 2014.
- [21] M. Masuda and K. Ito, “Semi-autonomous centipede-like robot with flexible legs,” Proc. of IEEE Int. Symposium on Safety, Security, and Rescue Robotics 2014 (SSRR2014), Hokkaido, Japan, October 27-30, 2014,
- [22] K. Ito and Y. Ishigaki, “Semiautonomous centipede-like robot for rubble – Development of an actual scale robot for rescue operation,” Int. J. Advanced Mechatronic Systems, Vol.6, No.2/3, pp. 75-83, 2015.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.