Paper:
Risk Predictive Driver Assistance System for Collision Avoidance in Intersection Right Turns
Yohei Fujinami*, Pongsathorn Raksincharoensak*, Dirk Ulbricht**, and Rolf Adomat**
*Department of Mechanical Systems Engineering, Faculty of Engineering, Tokyo University of Agriculture and Technology
2-24-16 Naka-cho, Koganei, Tokyo 184-8588, Japan
**Division Chassis & Safety, Continental Automotive Corporation
Peter-Dornier-Strase 10, D-88131 Lindau, Germany

Most traffic accidents that result in injuries or fatalities occur in intersections. In Japan, where cars drive on the left, most of such accidents involve cars that are turning right. This situation serves as the basis of the development of our Advanced Driver Assistance System (ADAS) for intersection right turns. This research focuses on the scenario in which an object darts out from the blind spot created by heavy oncoming traffic as a vehicle is making an intersection right turn. When this happens, even if the driver brakes as hard as possible or an active safety function such as the Autonomous Emergency Braking System (AEBS) applies the brakes, the natural limits of physical friction may make it impossible to avoid a collision. To improve traffic safety given the limited potential of physical friction, this research seeks to develop a risk-predictive right-turn assistance system. The system predicts potential oncoming objects and reduces the vehicle velocity in advance. Blind corners can be detected by on-board sensors without requiring information from surrounding infrastructure. This paper presents a right-turn assistance system that avoids conflict with the AEBS in emergencies by decelerating the ego vehicle to a safe velocity.
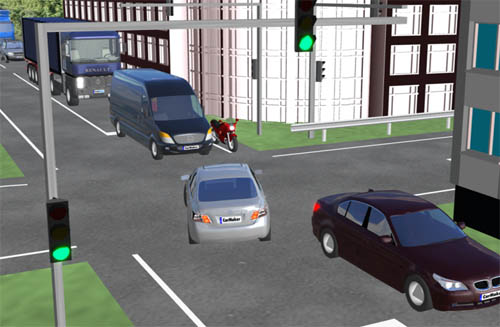
Proactive braking assistance in intersection
- [1] National Police Agency Traffic Bureau, “Status of Traffic Fatal Accident Occurrence and Status of Violation Control of Road Traffic Act in 2015,” Portal Site of Official Statistics of Japan, p. 29, 2016.
- [2] Institute for Traffic Accident Research and Data Analysis (ITARDA), “Traffic accident status and Human factorial experiment in signalized intersections,” Abridgement research report in 2012, pp. 6-13, 2012.
- [3] G. R. De Campos, A. H. Runarsson, and F. Granum, “Collision Avoidance at Intersections: A Probabilistic Threat Assessment and Decision-Making System for Safety Interventions,” 17th Int. IEEE Conf. on Intelligent Transportation System, pp. 649-654, 2014.
- [4] M. Brannstrom, E. Coelingh, and J. Sjoberg, “Threat assessment for avoiding collisions with turning vehicles,” 2009 IEEE Intelligent Vehicle Symposium, pp. 663-668, 2009.
- [5] N. Uchida, M. Kawakoshi, T. Tagawa, and E. Akutsu, “Investigation of Right-Turn Accident Risks Based on Traffic-Conflict Data – Traffic Situations and Driving Behavior that Degrade Oncoming Vehicle Detection –,” JARI Research J., Vol.31, No.4, pp. 39-43, 2009.
- [6] S. Nakamura, H. Suganuma, K. Kikuchi, and R. Homma, “Effect Evaluation of Vehicle-Infrastructure Cooperative Right-Turn Collision Prevention System,” Toyota Technical Review, pp. 74-81, 2015.
- [7] J. Harding, G. Powell, R. Yoon, J. Fikentscher, C. Doyle, D. Sade, M. Lukuc, J. Simons, and J. Wang, “Vehicle-to-Vehicle Communications: Readiness of V2V Technology for Application,” Technical Report of National Highway Traffic Safety Administration, DOT HS 812 014, pp. 122-126, 2014.
- [8] P. Raksincharoensak and Y. Akamatsu, “Development of Collision Avoidance System in Right Turn Maneuver Using Vehicle-in-the-Loop Simulation,” J. of Robotics and Mechatronics, Vol.27, No.6, pp. 627-635, 2015.
- [9] P. Raksincharoensak, Y. Akamatsu, K. Moro, and M. Nagai, “Driver Speed Control Modeling for Predictive Braking Assistance System Based on Risk Potential in Intersections,” J. of Robotics and Mechatronics, Vol.26, No.5, pp. 628-637, 2014.
- [10] R. Matsumi, P. Raksincharoensak, and M. Nagai, “Development of Autonomous Intelligent Driving System to Enhance Safe and Secured Traffic Society for Elderly Drivers,” J. of Robotics and Mechatronics, Vol.25, No.6, pp. 966-972, 2013.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.