Paper:
Adaptive Path Planning for Cleaning Robots Considering Dust Distribution
Takahiro Sasaki*, Guillermo Enriquez**, Takanobu Miwa**, and Shuji Hashimoto**
*School of Advanced Science and Engineering, Waseda University
3-4-1 Okubo, Shinjuku-ku, Tokyo 165-8555, Japan
**Faculty of Science and Engineering, Waseda University
3-4-1 Okubo, Shinjuku-ku, Tokyo 165-8555, Japan

Path-planning algorithms for cleaning robots typically focus on how the robots can cover an entire space while minimizing overlapping or uncleaned areas. However, when considering actual environments, the distribution of dust and dirt is not uniform and has some specific features according to the shape of the environment and human behaviors. Therefore, if a cleaning robot plans its path while taking this distribution into consideration, it can clean the area more efficiently. In this paper, we present a novel path-planning algorithm for cleaning robots that prioritizes regions with large quantities of dirt and sorts them. The effectiveness of the proposed algorithm was examined through experimental simulations.
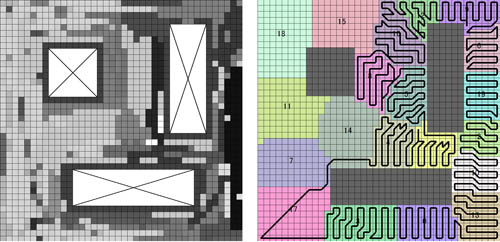
Cleaning path considering dust distribution
- [1] Z. Zhao, W. Chen, C. C. Y. Peter, and X. Wu, “A Novel Navigation System for Indoor Cleaning Robot,” Int. Conf. on Robotics and Biomimetics, pp. 2159-2164, 2016.
- [2] K. M. Hasan, A.-A. Nahid, and K. J. Reza, “Path Planning Algorithm Development for Autonomous Vacuum Cleaner Robots,” Int. Conf. on Informatics, Electronics & Vision (ICIEV), 978-1-4799-5180-2/14, 2014.
- [3] E. Galceran and M. Carreras, “A survey on coverage path planning for robotics,” Robotics and Autonomous Systems, Vol.61, No.12, pp. 1258-1276, 2013.
- [4] I. A. Hameed, D. Bochtis, and C. A. Sørensen, “An Optimized Field Coverage Planning Approach for Navigation of Agricultural Robots in Fields Involving Obstacle Areas,” Int. J. of Advanced Robotic Systems, Vol.10, No.231, pp. 1-9, 2013.
- [5] M. Weiss-Cohen, I. Sirotin, and E. Rave, “Lawn Mowing System for Known Areas,” Computational Intelligence for Modelling Control & Automation Int. Conf., pp. 539-544, 2008.
- [6] E. Galceran and M. Carreras, “Efficient Seabed Coverage Path Planning for ASVs and AUVs,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 88-93, 2012.
- [7] C. N. Macleod, G. Dobie, S. G. Pierce, R. Summan, and M. Morozov, “Machining-Based Coverage Path Planning for Automated Structural Inspection,” IEEE Trans. on Automation Science and Engineering, pp. 1-12, 2016.
- [8] D. Li, X. Wang, and T. Sun, “Energy-optimal coverage path planning on topographic map for environment survey with unmanned aerial vehicles,” Electronics Letters, Vol.52, No.9, pp. 699-701, 2016.
- [9] L. H. Nama, L. Huanga, X. J. Lia, and J. F. Xub, “An Approach for Coverage Path Planning for UAVs,” IEEE Advanced Motion Control, pp. 411-416, 2016.
- [10] H. Choset, “Coverage of Known Spaces: The Boustrophedon Cellular Decomposition,” Autonoumous Robots, Vol.9, No.3, pp. 247-253, 2000.
- [11] Z. Chibin, W. Xingsong, and D. Yong, “Complete Coverage Path Planning Based on Ant Colony Algorithm,” 15th Int. Conf. on Mechatronics and Machine Vision in Practice, pp. 357-361, 2008.
- [12] W. Zhongmin and Z. Bo, “Coverage Path Planning for Mobile Robot Based on Genetic Algorithm,” IEEE Workshop on Electronics, Computer and Applications, pp. 732-735, 2014.
- [13] G. P. Strimel and M. M. Veloso, “Coverage Planning with Finite Resources,” RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2950-2956, 2014.
- [14] S. Bochkarev and S. L. Smith, “On Minimizing Turns in Robot Coverage Path Planning,” IEEE Int. Conf. on Automation Science and Engineering (CASE), pp. 1237-1242, 2016.
- [15] X. Yu and J. Y. Hung, “Coverage Path Planning Based on a Multiple Sweep Line Decomposition,” 41st Annual Conf. of the IEEE Industrial Electronics Society (IECON 2015), pp. 4052-4058, 2015.
- [16] S. Brown and S. L. Waslander, “The Constriction Decomposition Method for Coverage Path Planning,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 3233-3238, 2016.
- [17] C. Luo and S. X. Yang, “A Bioinspired Neural Network for Real-Time Concurrent Map Building and Complete Coverage Robot Navigation in Unknown Environments,” IEEE Trans. on Neural Networks, Vol.19, No.7, pp. 1279-1298, 2008.
- [18] A. Zelinsky, R. A. Jarvis, J. C. Byrne, and S. Yuta, “Planning paths of complete coverage of an unstructured environment by a mobile robot,” Proc. of Int. Conf. on Advanced Robotics, pp. 533-538, 1993.
- [19] Y.-H. Choi, T. K. Lee, S. H. Baek, and S. Y. Oh, “Online Complete Coverage Path Planning for Mobile Robots Based on Linked Sprial Paths Using Constrained Inverse Distance Transform,” IEEE RSJ Int. Conf. on Intelligent Robots and Systems, pp. 5788-5793, 2009.
- [20] M. A. Yakoubi and M. T. Laskri, “The path planning of cleaner robot for coverage region using Genetic Algorithms,” J. of Innovation in Digital Ecosystems, Vol.3, pp. 37-43, 2016.
- [21] T. Sasaki, G. Enriquez, T. Miwa, and S. Hashimoto, “Coverage Path Planning for Cleaning Robot Adapted to Biased Dirt Distribution,” Proc. of the 2016 JSME Conf. on Robotics and Mechatronics (ROBOMECH), 1A1-13b4, 2016 (in Japanese).
- [22] S. K. Parui, S. Sarkar, and B. B. Chaudhuri, “Computing the shape of a point set in digital images,” Pattern Recognition Letters, Vol.14, No.2, pp. 89-94, 1993.
- [23] Q. Du, V. Faber, and M. Gunzburger, “Centroidal Voronoi Tessellations:Applications and Algorithms,” SIAM Review, Vol.41, No.4, pp. 637-676, 1999.
- [24] T. Ohyama, “Division of a Region into Equal Areas Using Additively Weighted Power Diagrams,” Voronoi Diagrams in Science and Engineering, pp. 152-158, 2007.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.