Paper:
Analysis of the Energy Loss on Quadruped Robot Having a Flexible Trunk Joint
Masahiro Ikeda and Ikuo Mizuuchi
Tokyo University of Agriculture and Technology
2-24-16 Nakacho, Koganei-shi, Tokyo 184-8588, Japan

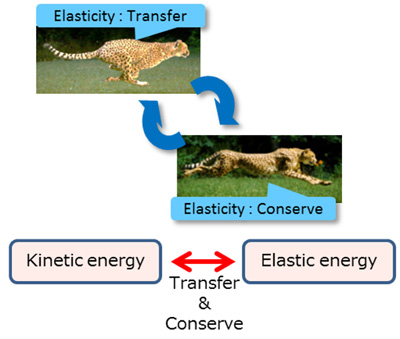
Energy flow in legged robot
- [1] A. Ruinaa, J. E. A. Bertramb, and M. Srinivasana, “A collisional model of the energetic cost of support work qualitatively explains leg sequencing in walking and galloping, pseudo-elastic leg behavior in running and the walk-to-run transition,” Int. J. of Theoretical Biology, Vol.237, No.2, pp. 170-192, 2005.
- [2] A. R. McN, N. J. Dimery, and R. F. Ker, “Elastic structures in the back and their role in galloping in some mammals,” Int. J. of Zoology, Vol.207, No.4, pp. 467-482, 1985.
- [3] R. M. Alexander, “Gaits of Mammals and Turtles,” J. of the Robotics Society of Japan, Vol.11, No.3, pp. 314-319, 1993.
- [4] H. M. Herr, G. T. Huang, and T. A. McMahon, “A model of scale effects in mammalian quadrupedal running,” J. of Experimental Biology, Vol.205, No.7, pp. 959-967, 2002.
- [5] A. R. McN, “Three uses for springs in legged locomotion,” Int. J. of Robotics Research, Vol.9, No.2, pp. 53-61, 1990.
- [6] J. Pratt, “Towards Understanding Simple Open Loop Models of Fast Running,” Dynamic Walking 2014, 2014.
- [7] S. Seok, A. Wang, M. Y. Chuah, D. Otten, J. Lang, and S. Kim, “Design principles for highly efficient quadrupeds and implementation on the MIT Cheetah robot,” 2013 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3307-3312, 2013.
- [8] D. J. Hyun, S. Seok, J. Lee, and S. Kim, “High speed trot-running: Implementation of a hierarchical controller using proprioceptive impedance control on the mit cheetah,” The Int. J. of Robotics Research, Vol.33, No.11, pp. 1417-1445, 2014.
- [9] S. Kim, J. E. Clark, and M. R. Cutkosky, “isprawl: Design and tuning for high-speed autonomous open-loop running,” The Int. J. of Robotics Research, Vol.25, No.9, pp. 903-912, 2006.
- [10] A. Ming, K. Sato, R. Sato, E. Kazama, I. Miyamoto, and M. Shimojo, “Development of robot leg composed of parallel linkage and elastic spring for dynamic locomotion,” 2015 IEEE Int. Conf. on Information and Automation, pp. 38-43, 2015.
- [11] R. Sato, I. Miyamoto, K. Sato, A. Ming, and M. Shimojo, “Development of robot legs inspired by bi-articular muscle-tendon complex of cats,” 2015 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 1552-1557, 2015.
- [12] R. Blickhan, “The spring-mass model for running and hopping,” J. of biomechanics, Vol.22, No.11-12, pp. 1217-1227, 1989.
- [13] T. Takuma, M. Ikeda, and T. Masuda, “Facilitating multi-modal locomotion in a quadruped robot utilizing passive oscillation of the spine structure,” 2010 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 4940-4945, 2010.
- [14] T. Takuma, M. Ikeda, and T. Masuda, “Development of 3D Quadruped Robot with Animal-like Trunk and Leg Mechanisms,” The 5th Int. Symposium on Adaptive Motion in Animals and Machines (AMAM2011), pp. 73-74, 2011.
- [15] K. Narioka, A. Rosendo, A. Sproewitz, and K. Hosoda, “Development of a minimalistic pneumatic quadruped robot for fast locomotion,” 2012 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO), pp. 307-311, 2012.
- [16] Q. Cao and I. Poulakakis, “On the Energetics of Quadrupedal Bounding With and Without Torso Compliance,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 4901-4906, 2014.
- [17] R. M. Alexander, “The gaits of bipedal and quadrupedal animals,” The Int. J. of Robotics Research, Vol.3, No.2, pp. 49-59, 1984.
- [18] R. V. Ham, B. Vanderborght, M. V. Damme, B. Verrelst, and D. Lefeber, “Maccepa, the mechanically adjustable compliance and controllable equilibrium position actuator: Design and implementation in a biped robot,” Robotics and Autonomous Systems, Vol.55, No.10, pp. 761-768, 2007.
- [19] K. F. Laurin-Kovitz, J. E. Colgate, and S. D. Carnes, “Design of components for programmable passive impedance,” Proc. of 1991 IEEE Int. Conf. on Robotics and Automation, pp. 1476-1481, 1991.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.