Paper:
Sliding Passive Dynamic Walking of Compass-Like Biped Robot: Collision Modeling, Necessary Conditions, and Complexity
Fumihiko Asano* and Yuji Harata**
*School of Information Science, Japan Advanced Institute of Science and Technology
1-1 Asahidai, Nomi, Ishikawa 923-1292, Japan
**Department of Mechanical Systems Engineering, Graduate School of Engineering, Hiroshima University
1-4-1 Kagamiyama, Higashi-Hiroshima, Hiroshima 739-8527, Japan

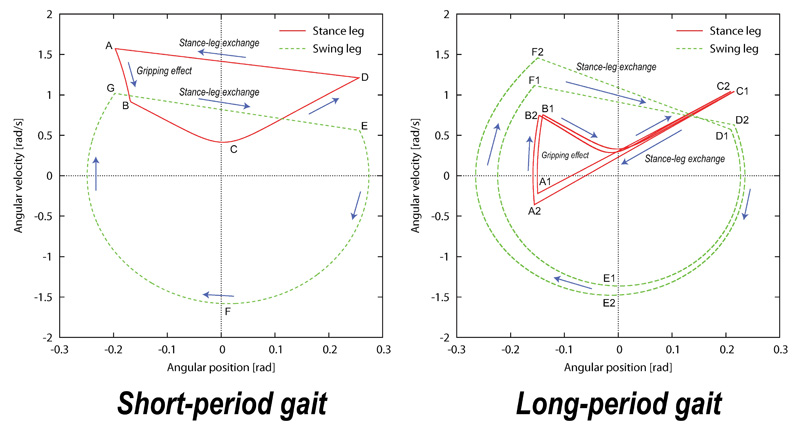
Short- and long-period sliding passive compass gaits
- [1] K. Miura, F. Kanehiro, K. Kaneko, S. Kajita, and K. Yokoi, “Slip-turn for biped robots,” IEEE Trans. on Robotics, Vol.29, Issue 4, pp. 875-887, 2013.
- [2] T. Senoo, M. Takano, and M. Ishikawa, “Dynamic horizontal movement of a bipedal robot using frictional asymmetry,” Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1834-1839, 2012.
- [3] B. Gamus and Y. Or, “Dynamic bipedal walking under stick-slip transitions,” SIAM J. on Applied Dynamical Systems, Vol.14, Issue 2, pp. 609-642, 2015.
- [4] G. N. Boone and J. K. Hodgins, “Reflexive responses to slipping in bipedal running robots,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 158-164, 1995.
- [5] F. Asano, T. Saka, and T. Fujimoto, “Passive dynamic walking of compass-like biped robot on slippery downhill,” Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4113-4118, 2015.
- [6] F. Asano, T. Saka, and Y. Harata, “3-DOF passive dynamic walking of compass-like biped robot with semicircular feet generated on slippery downhill,” Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 3570-3575, 2016.
- [7] C. C. de Wit, H. Olsson, and K. J. Å ström, “A new model for control of systems with friction,” IEEE Trans. on Automatic Control, Vol.40, No.3, pp. 419-425, 1995.
- [8] A. Goswami, B. Thuilot, and B. Espiau, “A study of the passive gait of a compass-like biped robot symmetry and chaos,” The Int. J. of Robotics Research, Vol.17, No.12, pp. 1282-1301, 1998.
- [9] J.-S. Moon and M. W. Spong, “Classification of periodic and chaotic passive limit cycles for a compass-gait biped with gait asymmetries,” Robotica, Vol.29, Issue 7, pp. 967-974, 2011.
- [10] M. Ohshima and F. Asano, “Underactuated bipedal walking with knees that generates measurable period of double-limb support,” Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 5643-5648, 2013.
- [11] J. M. Font-Llagunes and J. Kövecses, “Dynamics and energetics of a class of bipedal walking systems,” Mechanism and Machine Theory, Vol.44, Issue 11, pp. 1999-2019, 2009.
- [12] Y. Ikemata, A. Sano, and H. Fujimoto, “A physical principle of gait generation and its stabilization derived from mechanism of fixed point,” Proc. IEEE Int. Conf. on Robotics Automation, pp. 836-841, 2006.
- [13] S. H. Collins, M. Wisse, and A. Ruina, “A three-dimensional passive-dynamic walking robot with two legs and knees,” Int J. of Robotics Research, Vol.20, No.2, pp. 607-615, 2001.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.