Paper:
Asymmetric Swing-Leg Motions for Speed-Up of Biped Walking
Yuta Hanazawa* and Fumihiko Asano**
*Department of Applied Science for Integrated System Engineering, Graduate School of Engineering, Kyushu Institute of Technology
1-1 Sensui, Tobata, Kitakyushu, Fukuoka 804-8550, Japan
**School of Information Science, Japan Advanced Institute of Science and Technology
1-1 Asahidai, Nomi, Ishikawa 923-1292, Japan

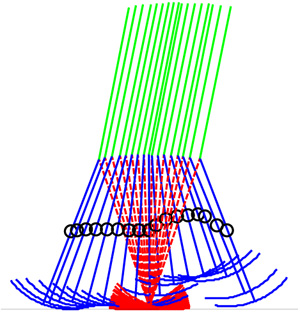
Stick diagram of limit cycle walking with asymmetric swing-leg motion
- [1] S. H. Collins and A. Ruina, “A bipedal walking robot with efficient and human-like gait,” Proc. IEEE Int. Conf. on robotics and automation (ICRA), pp. 1983-1988, 2005.
- [2] T. McGeer, “Passive dynamic walking,” The Int. J. of Robotics Research, Vol.9, No.2, pp. 62-82,1990.
- [3] D. G. E. Hobbelen and M. Wisse, “Limit cycle walking,” Humanoid Robots, Human-like Machines, chapter 14, InTech, 2007.
- [4] F. Asano, M. Yamakita, and K. Furuta, “Virtual passive dynamic walking and energy-based control laws,” Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 1149-1154, 2002.
- [5] F. Asano, M. Yamakita, N. Kamamichi, and Z. W. Luo, “A novel gait generation for biped walking robots based on mechanical energy constraint,” IEEE Trans. on Robotics and Automation, Vol.20, No.3, pp. 565-573, 2004.
- [6] M. Wisse and J. Van Frankenhuyzen, “Design and construction of mike; a 2d autonomous biped based on passive dynamic walking,” Proc. Int. Symposium of Adaptive Motion and Animals and Machines (AMAM03), 2003.
- [7] M. Wisse,“Three additions to passive dynamic walking; actuation, an upper body, and 3D stability,” Proc. IEEE/RAS Int. Conf. on Humanoid Robots (Humanoids), Vol.1, pp. 113-132, 2004.
- [8] T. Narukawa, M. Takahashi, and K. Yoshida, “Biped locomotion on level ground by torso and swing-leg control based on passive-dynamic walking,” Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 4009-4014, 2005.
- [9] F. Asano and Z. W. Luo, “Energy-efficient and high-speed dynamic biped locomotion based on principle of parametric excitation,” IEEE Transactions on Robotics, Vol.24, No.6, pp. 1289-1301, 2008.
- [10] T. Kinugasa, S. Miwa, and K. Yoshida, “Frequency analysis for biped walking via leg length variation,” J. of Robotics and Mechatronics, Vol.20, No.1, pp. 98-105, 2008.
- [11] Y. Hanazawa, T. Hayashi, M. Yamakita, and F. Asano, “High-speed limit cycle walking for biped robots using active up-and-down motion control of wobbling mass,” Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 3649-3654, 2013.
- [12] Y. Hanazawa and F. Asano, “High-speed biped walking using swinging-arms based on principle of up-and-down wobbling mass,” Proc. IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 5191-5196, 2015.
- [13] F. Iida and R. Tedrake, “Minimalistic control of biped walking in rough terrain,” Autonomous Robots, Vol.28, No.3, pp. 355-368, 2010.
- [14] J. W. Grizzle, G. Abba, and F. Plestan, “Asymptotically stable walking for biped robots: Analysis via systems with impulse effects,” IEEE Trans. on automatic control, Vol.46, No.1, pp. 51-64, 2001.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.