Paper:
A Preliminary Study on the Handling of a Robotic Arm Based only on Temporarily Provided Auditory Information as a Substitute for Visual Information < The Case Study that Assumed the Resilient System Architecture >
Hiroshi Takahashi
Shonan Institute of Technology
1-1-25 Tsujido-Nishikaigan, Fujisawa, Kanagawa 251-8511, Japan

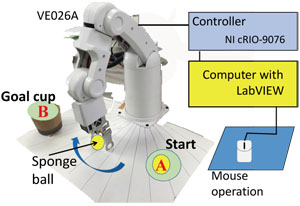
Robotic arm operation system
- [1] J. Snyder, “Audio Description: The Visual Made Verbal,” California State University, Northridge Conf. 2006, 2006.
- [2] T. Nishimoto, A. Mitsube, and T. Watanabe, “An analysis of the sports commentaries in radio programs,” The Institute of Electronics, Information and Communication Engineers Technical Report, WIT2006-6 , pp. 27-32, 2006 (in Japanese).
- [3] J. J. Gibson, “Ecological approach to visual perception,” Houghton Mifflin, 1979.
- [4] M. Iwata and T. Onisawa, “Linguistic expressions of picture information considering connections between pictures,” Electronics and Communications in Japan (Part III: Fundamental Electronic Science), Vol.86, No.12, pp. 38-53, 2003.
- [5] S. Matsuo, A. Kikuchi, J. F. Morris et al., “Guaranteeing Equal Access to lnformation and Plain Japanese as a Means of Equal Participation for Everyone: Specific Problems and Shared Aspects between Foreigners , Deaf and Hard-of-hearing People, and People with Intellectual Disabilities,” The Japanese Journal of Language in Society, Vol.16, No.1, pp. 22-38, 2013 (in Japanese).
- [6] A. Honda, H. Shibata, J. Gyoba et al., “Newly Developed Studies on Three-Dimensional Virtual Auditory Display: Transfer Effects of Playing Auditory Virtual reality Games,” Trans. of the Virtual Reality Society of Japan, Vol.12, No.4, pp.487-496, 2007 (in Japanese).
- [7] B. N. Walker and J. Lindsay, “Navigation performance with a virtual auditory display: Effects of beacon sound, capture radius, and practice,” Human Factors: The Journal of the Human Factors and Ergonomics Society, Vol.48, No.2, pp. 265-278, 2006.
- [8] K. Minamizawa, S. Kamuro, N. Kawakami, and S. Tachi, “Haptic Interaction with Virtual Objects in Midair using a Finger-worn Haptic Display,” Trans. of the Virtual Reality Society of Japan, Vol.13, No.4, pp. 415-420, 2008 (in Japanese).
- [9] G. Moy, C. Wagner, and R. S. Fearing, “A compliant tactile display for teletaction,” Proc. IEEE Int. Conf. on Robotics and Automation 2000 (ICRA’00), Vol.4, 2000.
- [10] Y. Kouno, M. Ishii, Y. Koike et al. “A proposal of real-time haptization system for untouchable objects,” Trans. on Virtual Reality Society of Japan, Vol.4, No.4, pp. 679-684, 1999.
- [11] T. Shimizu, T. Sakai, and T. Handa, “Vibration Presentation and Powered Mechanical Leading Method Using Tactile Display for Visually Impaired People,” NHK STRL R&D, No.154, pp. 30-37, 2015 (in Japanese).
- [12] Y. kouno, M. Ishii, Y. Koike, and M. Sato, “A Proposal of Haptization System for the Visually Impaired,” Image Information and Television Engineers Technical Report, Vol.23, No.31, pp.33-38, 1999 (in Japanese).
- [13] H. Maruyama, “Towards systems resilience,” 2013 43rd Annual IEEE/IFIP Conf. on Dependable Systems and Networks Workshop (DSN-W), 2013.
- [14] E. Hollnagel, D. D. Woods, and N. C. Leveson, “Resilience engineering: concepts and precepts,” Ashgate Publishing, Ltd., 2007.
- [15] C. S. Holling, “Resilience and Stability of Ecological Systems,” Annual Review of Ecology and Systematics, Vol.4, 1973.
- [16] Longstaff et al., “Building Resilient Communities,” Homeland Security Affairs, Vol.6, No.3, 2010.
- [17] R. S. Legaspi and H. Maruyama, “Meta-Theory and Machine-Intelligent Modeling of Systemic Changes for the Resilience of a Complex System,” Proc. of Tenth Int. Conf. on Systems (ICONS 2015), 2015.
- [18] J. Chandra, “A Framework for Robust and Resilient Critical Infrastructure Systems,” JACIII, Vol.10, No.3, pp. 265-269, 2006.
- [19] Denso wave incorporated, “GP Operator / Academic Robot publicity matter,” 2011 (in Japanese).
- [20] A. Dasilva, “Small Robotic Arm Starter Kit,” Japan National Instrumnets, 2011.
- [21] Japan National Instrumnets, “Educatinal Robotic Arm Set-up Manual,” 2012.
- [22] H. Takahashi, “A Preliminary Study on Resilient Humna-Machine Interface,” The Japan Society of Mechanical Engineers annual meeting, J1630104, 2014 (in Japanese).
- [23] C. Hayashi, “On the prediction of phenomena from qualitative data and the quantification of qualitative data from the mathematico-statistical point of view,” Annals of the Institute of Statistical Mathematics, Vol.3, pp. 69-98, 1951.
- [24] J. Lin, “Feature extraction of machine sound using wavelet and its application in fault diagnosis,” NDT & E Int., Vol.34, No.1, pp. 25-30, 2001.
- [25] S. Harnad, “Grounding Symbolic Representation in Categorical Perception (Ph.D. thesis),” Princeton University, 1992.
- [26] J. McCarthy and P. J. Hayes, “Some Philosophical Problems from the Standpoint of Artificial Intelligence,” Machine Intelligence, Vol.4, pp. 463-502, 1969.
- [27] V. R. Lesser and L. D. Erman, “Distributed Interpretation: A Model and Experirnent,”IEEE Trans. on ComPuter, Vol.29, No.12, pp. 1144-1163, 1983.
- [28] I. Arel, D. Rose, and R. Coop, “DeSTIN: A Scalable Deep Learning Architecture with Application to High-Dimensional Robust Pattern Recognition,” AAAI Fall Symposium: Biologically Inspired Cognitive Architectures, 2009.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.