Paper:
Antagonistically Twisted Round Belt Actuator System for Robotic Joints
Takahiro Inoue*, Ryuichi Miyata*, and Shinichi Hirai**
*Okayama Prefectural University
111 Kuboki, Soja, Okayama 719-1197, Japan
**Ritsumeikan University
1-1-1 Noji-higashi, Kusatsu, Shiga 525-8577, Japan

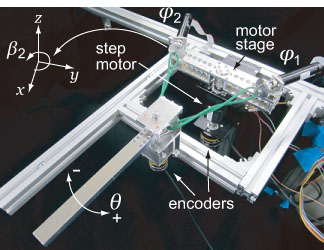
Antagonistically twisted round belt actuator
- [1] J. L. Pons (Eds.), “Wearable Robots: Biomechatronic Exoskeletons,” John Wiley & Sons, Inc., 2008.
- [2] D. Feil-Seifer and M. J. Mataric, “Defining socially assistive robotics,” IEEE Int. Conf. Rehabilitation Robotics, pp. 465-468, 2005.
- [3] R. V. Ham, T. G. Sugar, B. Vanderborght, K. W. Hollander, and D. Lefeber, “Compliant Actuator Designs,” IEEE Robotics & Automation Magazine, pp. 81-94, 2009.
- [4] H. Liu, X. Deng, and H. Zha, “A planning method for safe interaction between human arms and robot manipulators,” IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 2724-2730, 2005.
- [5] M. M. Williamson, “Series Elastic Actuators,” A. I. Technical Report, No.1524, 1995.
- [6] G. A. Pratt and M. M. Williamson, “Series elastic actuators,” IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 399-406, 1995.
- [7] I. Gaponov, D. Popov, and J.-H. Ryu, “Twisted String Actuation Systems: A Study of the Mathematical Model and a Comparison of Twisted Strings,” IEEE/ASME Trans. Mechatronics, Vol.19, No.4, pp. 1331-1342, 2014.
- [8] H. Yu, S. Huang, G. Chen, S. Toh, M. S. Cruz, Y. Ghorbel, C. Zhu, and Y. Yin, “Design and analysis of a novel compact compliant actuator with variable impedance,” IEEE Int. Conf. Robotics and Biomimetics, pp. 1188-1193, 2012.
- [9] H. Yu, S. Huang, G. Chen, and N. Thakor, “Control design of a novel compliant actuator for rehabilitation robots,” Mechatronics, Vol.23, No.8, pp. 1072-1083, 2013.
- [10] J. Pratt, B. Krupp, and C. Morse, “Series elastic actuators for high fidelity force control,” Industrial Robot, Vol. 29, No.3, pp. 234-241, 2002.
- [11] S. M. M. Rahman, “A novel variable impedance compact compliant series elastic actuator for human-friendly soft robotics applications,” IEEE RO-MAN, pp. 19-24, 2012.
- [12] I. Gaponov, D. Popov, and J.-H. Ryu, “Twisted String Actuators: Outline, Applications, and Challenges,” IEEE/RSJ Int. Conf. Workshop Intelligent Robots and Systems, 2014.
- [13] D. Popov, I. Gaponov, and J.-H. Ryu, “A preliminary study on a twisted strings-based elbow exoskeleton,” IEEE World Haptics Conf., pp. 479-484, 2013.
- [14] Y. J. Shin, H. J. Lee, K.-S. Kim, and S. Kim, “A Robot Finger Design Using a Dual-Mode Twisting Mechanism to Achieve High-Speed Motion and Large Grasping Force,” IEEE Trans. Robotics, Vol.28, No.6, pp. 1398-1405, 2012.
- [15] G. Palli, G. Borghesan, and C. Melchiorri, “Modeling, Identification, and Control of Tendon-Based Actuation Systems,” IEEE Trans. Robotics, Vol.28, No.2, pp. 277-290, 2012.
- [16] G. Palli, C. Natale, C. May, C. Melchiorri, and T. Würtz, “Modeling and Control of the Twisted String Actuation System,” IEEE/ASME Trans. Mechatronics, Vol.18, No.2, pp. 664-673, 2013.
- [17] T. Würtz, C. May, B. Holz, C. Natale, G. Palli, and C. Melchiorri, “The twisted string actuation system: Modeling and control,” IEEE/ASME Int. Conf. Advanced Intelligent Mechatronics, pp. 1215-1220, 2010.
- [18] G. Palli, S. Pirozzi, C. Natale, G. D. Maria, and C. Melchiorri, “Mechatronic design of innovative robot hands: Integration and control issues,” IEEE/ASME Int. Conf. Advanced Intelligent Mechatronics, pp. 1755-1760, 2013.
- [19] G. Palli, L. Pan, M. Hosseini, L. Moriello, and C. Melchiorri, “Feedback linearization of variable stiffness joints based on twisted string actuators,” IEEE Int. Conf. Robotics and Automation, pp. 2742-2747, 2015.
- [20] G. Palli, M. Hosseini, L. Moriello, and C. Melchiorri, “Modeling and identification of a variable stiffness joint based on twisted string actuators,” IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 1757-1762, 2015.
- [21] M. R. Motamedi, D. Florant, and V. Duchaine, “A Wearable Haptic Device Based on Twisting Wire Actuators for Feedback of Tactile Pressure Information,” J. of Robotics and Mechatronics, Vol.27, No.4, pp. 419-429, 2015.
- [22] T. Sonoda and I. Godler, “Position and force control of a robotic finger with twisted strings actuation,” IEEE/ASME Int. Conf. Advanced Intelligent Mechatronics, pp. 611-616, 2011.
- [23] T. Sonoda, K. Ishii, A. Nassiraei, and I. Godler, “Control of Robotic Joint by using Antagonistic Pair of Twist Drive Actuators,” IECON, pp. 5410-5415, 2012.
- [24] D. Popov, I. Gaponov, and J.-H. Ryu, “Towards variable stiffness control of antagonistic twisted string actuators,” IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 2789-2794, 2014.
- [25] H. Singh, D. Popov, I. Gaponov, and J.-H. Ryu, “Passively adjustable gear based on twisted string actuator: Concept, model and evaluation,” IEEE Int. Conf. Robotics and Automation, pp. 238-243, 2015.
- [26] U. Mehmood, D. Popov, I. Gaponov, and J.-H. Ryu, “Rotational twisted string actuator with linearized output: Mathematical model and experimental evaluation,” IEEE/ASME Int. Conf. Advanced Intelligent Mechatronics, pp. 1072-1077, 2015.
- [27] D. Popov, I. Gaponov, and J.-H. Ryu, “Bidirectional elbow exoskeleton based on twisted-string actuators,” IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 5853-5858, 2013.
- [28] T. Inoue, S. Yamamoto, R. Miyata, and S. Hirai, “A Robotic Joint Design by Agonist and Antagonist Arrangement with Twisting Small-diameter Round-belts,” IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 1751-1756, 2015.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.