Paper:
Self-Tuning Generalized Minimum Variance Control Based on On-Demand Type Feedback Controller
Akira Yanou, Mamoru Minami, and Takayuki Matsuno
Graduate School of Natural Science and Technology, Okayama University
3-1-1 Tsushimanaka, Kita-ku, Okayama 700-8530, Japan

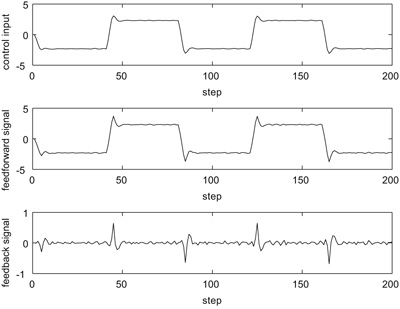
Feedback signal is generated on demand
- [1] D. W. Clarke, M. A. D. Phil, and P. J. Gawthrop, “Self-tuning control,” Proc. IEE, Vol.126, No.6, pp. 633-640, 1979.
- [2] A. Inoue, A. Yanou, and Y. Hirashima, “A Design of a strongly Stable Self-Tuning Controller Using Coprime Factorization Approach,” Preprints of the 14th IFAC World Congress, Vol.C, pp. 211-216, 1999.
- [3] A. Inoue, A. Yanou, T. Sato, and Y. Hirashima, “An Extension of Generalized Minimum Variance Control for Multi-input Multi-output Systems Using Coprime Factorization Approach,” Proc. of the American Control Conf., pp. 4184-4188, 2000.
- [4] M. Vidyasagar, “Control System Synthesis: A Factorization Approach,” The MIT Press, 1985.
- [5] A. Wang, D. Wang, H. Wang, S. Wen, and M. Deng, “Nonlinear Perfect Tracking Control for a Robot Arm with Uncertainties Using Operator-Based Robust Right Coprime Factorization Approach,” J. of Robotics and Mechatronics, Vol.27, No.1, pp. 49-56, 2015.
- [6] D. Wang, F. Li, S. Wen, X. Qi, P. Liu, and M. Deng, “Operator-Based Sliding-Mode Nonlinear Control Design for a Process with Input Constraint,” J. of Robotics and Mechatronics, Vol.27, No.1, pp. 83-90, 2015.
- [7] A. Yanou, A. Inoue, and Y. Hirashima, “An Extension of Discrete-time Model Reference Adaptive Control by Using Coprime Factorization Approach,” Proc. CCA/CACSD 2002, pp. 606-610, 2002.
- [8] A. Yanou and A. Inoue, “An Extension of Multivariable Continuous-time Generalized Predictive Control by using Coprime Factorization Approach,” Proc. SICE Annual Conf. 2003 in Fukui, pp. 3018-3022, 2003.
- [9] A. Yanou, A. Inoue, M. Deng, and S. Masuda, “An Extension of Two Degree-of-Freedom of Generalized Predictive Control for M-input M-output Systems Based on State Space Approach,” Int. J. of Innovative Computing, Information and Control (Special Issue on New Trends in Advanced Control and Applications), Vol.4, No.12, 2008.
- [10] A. Yanou, M. Deng, and A. Inoue, “A Design of a Strongly Stable Generalized Minimum Variance Control Using a Genetic Algorithm,” Proc. ICROS-SICE Int. Joint Conf. 2009, pp. 1300-1304, 2009.
- [11] A. Inoue, T. Henmi, and M. Deng, “Strongly Stable GPC with Suppression of Steady State Gain and Closed-loop Poles,” Proc. of the 2015 Int. Conf. on Advanced Mechatronic Systems, pp. 322-327, 2015.
- [12] A. Yanou, M. Minami, and T. Matsuno, “A Design Method of Self-Tuning Controller Using Strongly Stable Rate,” Proc. SICE SSI2013, pp. 663-667, 2013.
- [13] A. Yanou, M. Minami, and T. Matsuno, “Strong Stability Rate for Control Systems using Coprime Factorization,” Trans. of the Society of Instrument and Control Engineers, Vol.50, No.5, pp. 441-443, 2014.
- [14] A. Yanou, M. Minami, and T. Matsuno, “Safety Assessment of Self-tuning Generalized Minimum Variance Control by Strong Stability Rate,” IEEJ Trans. on Electronics, Information and Systems, Vol.134, No.9, pp. 1241-1246, 2014.
- [15] A. Yanou, M. Minami, and T. Matsuno, “A Design Method of On-Demand Type Feedback Controller Using Coprime Factorization,” Proc. of the 10th Asian Control Conf. 2015, 2015.
- [16] S. Okazaki, J. Nishizaki, A. Yanou, M. Minami, and M. Deng, “Strongly Stable Generalized Predictive Control Focused on Closed-loop Characteristics,” Trans. of the Society of Instrument and Control Engineers, Vol.47, No.7, pp. 317-325, 2011.
- [17] T. Yamamoto, Y. Sakawa, and S. Omatu, “A Construction of Pole-Assignment Self-Tuning Control System,” Trans. of the Society of Instrument and Control Engineers, Vol.30, No.3, pp. 285-294, 1994.
- [18] S. Omatu and T. Yamamoto (Ed.), “Self-Tuning Control,” SICE, 1996 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.