Paper:
Development of Six-DOF Human Ankle Motion Control Device Using Stewart Platform Structure for Fall Prevention
Kenta Nomura, Teru Yonezawa, Hiroshi Takemura, and Hiroshi Mizoguchi
Tokyo University of Science
2641 Yamazaki, Noda, Chiba 278-8510, Japan

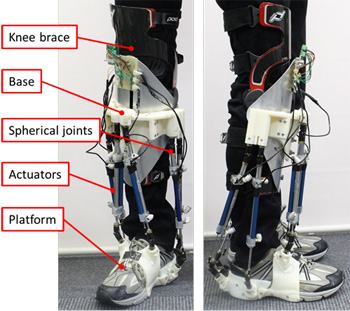
Developed device
- [1] L. Z. Rubenstein, “Falls in older people: epidemiology, risk factors and strategies for prevention,” Age and Ageing, Vol.35, No.2, pp. ii37-ii41, 2006.
- [2] P. W. Overstall, A. N. Exton Smith, F. J. Imms, and A. L. Johnson, “Falls in the elderly related to postural imbalance,” British Medical J., Vol.1, No.6056, pp. 261-264, 1977.
- [3] D. B. Jacqueline, “The aging body: conservative care for common neuro musculoskeletal conditions,” Enterprize, pp. 61-62, 2004 (in Japanese).
- [4] J. Saglia, N. Tsagarakis, J. Dai, and D. Caldwell, “A High Performance 2-dof Over-Actuated Parallel Mechanism for Ankle Rehabilitation,” IEEE Int. Conf. on Robotics and Automation, Kobe, Japan, pp. 2180-2186, 2009.
- [5] C. C. K. Lin, M. S. Ju, S. M. Chen, and B. W. Pan, “A specialized robot for ankle rehabilitation and evaluation,” J. of Medical and Biological Engineering, Vol.28, No.2, pp. 79-86, 2008.
- [6] S. Lee and Y. Sankai, “Power assist control for walking aid with hal-3 based on emg and impedance adjustment around knee joint,” IEEE RSJ Int. Conf. Intelligent Robots and Systems, pp. 1499-1504, 2002.
- [7] H. I. Krebs and N. Hogan, “Therapeutic robotics: a technology push,” Proc. of the IEEE, Vol.94, No.9, pp. 1727-1738, 2006.
- [8] D. Majoe and L. Widmer, “Power and Endurance for Comfortable Wearable Robotics,” 2014 IEEE Int. Conf. Robotics and Automation (ICRA), 31st May-4th, June, 2014.
- [9] T. Kikuchi, T. Tanaka, A. Shoji, S. Tanida, and M. Kato, “Gait measurement system to develop control model of intelligently controllable ankle-foot orthosis,” Proc. of the 2011 IEEE/SICE Int. Symposium on System Integration (SII2011), pp. 124-129, Kyoto, 2011.
- [10] J. Blaya and H. Herr, “Adaptive control of a variable-impedance ankle-foot orthosis to assist drop-foot gait,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.12, No.1, pp. 24-31, 2004.
- [11] K. A. Shorter, G. F. Kegler, E. Loth E, W. K. Durfee, and E. T. Hsiao Weeksler, “A Portable powered ankle foot orthosis for rehabilitation,” J. of Rehabilitation Research and Development, Vol.48, No.4, pp. 459-472, 2011.
- [12] J. O. Nnodim, H. Kim, and J. A. Ashton-Miller, “Effect of a vocal choice reaction time task on the kinematics of the first recovery step after a sudden underfoot perturbation during gait,” Gait Posture, Vol.37, No.1, pp. 61-66, 2013.
- [13] M. J. Pavol, T. M. Owings, K. T. Foley, and M. D. Grabiner, “The sex and age of older adults influence the outcome of induced trips,” J. Gerontol A. Biol. Sci. Med. Sci., Vol.54, No.2, pp. 103-108, 1999.
- [14] A. Mansfield et al., “Effect of a perturbation-based balance training program on compensatory stepping and grasping reactions in older adults: A randomized controlled trial,” Phys. Ther., Vol.90, No.4, pp. 476-91, 2010.
- [15] A. Mansfield, A. Peters, B. Liu, and B. Maki, “A perturbation-based balance training program for older adults: study protocol for a randomised controlled trial,” A Mansfield, BMC geriatrics, Vol.7, No.1, 12, 2007.
- [16] M. Schunke and E. Schulte, “Thieme atlas of anatomy: General anatomy and musculoskeletal system: Second edition,” IGAKU-SHOIN, pp. 417-419, pp. 452-453, 2011 (in Japanese).
- [17] S. B. Thies, J. A. Ashton-Miller, and J. K. Richardson, “What causes a crossover step when walking on uneven ground? A study in healthy young women,” Gait Posture, Vol.26, No.1, pp. 156-160, 2007.
- [18] W. P. Berg, H. M. Alessio, E. M. Mills, and C. Tong, “Circumstances and consequences of falls in independent community-dwelling older adults,” Age Ageing, Vol.26, No.4, pp. 261-268, 1997.
- [19] K. Nomura, T. Yonezawa, T. Ogitsu, H. Mizoguchi, and H. Takemura, “Development of Stewart platform type ankle-foot device for trip prevention support,” Proc. of EMBC’15, Milan, pp. 4808-4811, 2015.
- [20] D. Stewart, “A Platform with Six Degrees of Freedom,” Proc. of the Institution of Mechanical Engineers, Vol.180, No.15, pp. 371-386, 1965.
- [21] S.-H. Lee, J.-B. Song, W.-C. Choi, and D. Hong, “Position control of a stewart platform using inverse dynamics control with approximate dynamics,” Mechatronics, Vol.13, No.6, pp. 605-619, 2003.
- [22] T. Onodera, E. Suzuki, M. Ding, H. Takemura, and H. Mizoguchi, “Force, Stiffness and Viscous Damping Control of a Stewart-Platform-Type Ankle-Foot Rehabilitation Assist Device with Pneumatic Actuator,” J. of Robotics and Mechatronics, Vol.26, No.6, pp. 897-905, 2013.
- [23] K. Tamaki, K. Ohishi, K. Ohnishi, and K. Miyachi, “Study of Disturbance Suppression on I-PD Speed Control of DC Motor,” SICE, Vol.22, No.11, pp. 1231-1232, 1986.
- [24] T. Ohtani, “Oral History in Instrument and Control Engineering-Dr. Toshiyuki Kitamori ; I-PD Control and its Design Method,” J. of the Society of Instrument and Control Engineers, Vol.47, No.11, pp. 968-969, 2008.
- [25] T. Öberg, A. Karsznia, and K. Öberg, “Basic gait parameters: reference data for normal subjects, 10-79 years of age,” J. Rehab. Res. Dev., Vol.30, pp. 210-223, 1993.
- [26] R. W. Bohannon, “Comfortable and maximum walking speed of adults aged 20-79 years, reference values and determinants,” Age and Ageing, Vol.26, No.1, pp. 15-19, 1997.
- [27] R. P. Di Fabio, W. M. Kurszewski, E. E. Jorgenson, and R. C. Kunz, “Footlift Asymmetry During Obstacle Avoidance in High-Risk Elderly,” J. of American GeriatricsSociety, Vol.52, pp. 2088-2093, 2004.
- [28] L. E. Allet, H. Kim, J. A. Ashton-Miller, T. DeMott, and J. K. Richardson, “Step length after discrete perturbation predicts accidental falls and fall-related injury in elderly people with a range of peripheral neuropathy,” J. Diabetes Complications, Vol.28, No.1, pp. 79-84, 2014.
- [29] C. A. Forner, H. F. Koopman, and F. C. van der Helm, “Multiple-step strategies to recover from stumbling perturbations,” Gait Posture, Vol.18, No.1, pp. 47-59, 2003.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.