Paper:
Antisway Control for a Rotary Crane by Using Evolutionary Computation
Akira Abe* and Keisuke Okabe**
*Department of Systems, Control and Information Engineering, National Institute of Technology, Asahikawa College
2-2-1-6 Shunkodai, Asahikawa, Hokkaido 071-8142, Japan
**Department of Mechanical and Aerospace Engineering, School of Engineering, Tohoku University
6-6-01 Aoba, Aramaki, Aoba-ku, Sendai, Miyagi 980-8579, Japan

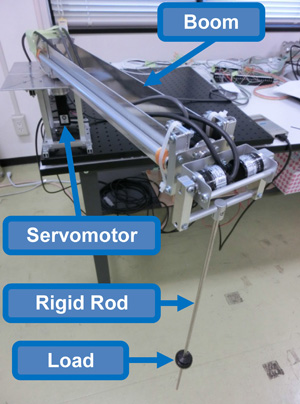
Photograph of the experimental setup
- [1] Y. Tanaka, Y. Yoshida, T. Ueta, and H. Kawakami, “Vibration suppressing control of flexible rotary crane using tip position sensor,” J. of Robotics and Mechatronics, Vol.4, No.6, pp. 520-525, 1992.
- [2] E. M. Abdel-Rahman, A. H. Nayfeh, and Z. N. Masoud, “Dynamics and control of cranes: a review,” J. of Vibration and Control, Vol.9, No.7, pp. 863-908, 2003.
- [3] P. Hyla, “The crane control systems: a survey,” Proc. of 17th Int. Conf. on Methods and Models in Automation and Robotics, pp. 505-509, 2012.
- [4] W. Singhose, J. Vaughan, K. C. C. Peng, B. Pridgen, U. Glauser, J. D. J. Marquez, and S. W. Hong, “Use of cranes in education and international collaborations,” J. of Robotics and Mechatronics, Vol.23, No.5, pp. 881-892, 2011.
- [5] J. Neupert, E. Arnold, K. Schneider, and O. Sawodny, “Tracking and anti-sway control for boom cranes,” Control Engineering Practice, Vol.18, No.1, pp. 31-44, 2010.
- [6] D. Blackburn, J. Lawrence, J. Danielson, W. Singhose, T. Kamoi, and A. Taura, “Radial-motion assisted command shapers for nonlinear tower crane rotational slewing,” Control Engineering Practice, Vol.18, No.5, pp. 523-531, 2010.
- [7] W. Singhose and W. Seering, “Command Generation for Dynamic System,” William Singhose, 2011.
- [8] W. Yu, M. A. Moreno-Armendariz, and F. O. Rodriguez, “Stable adaptive compensation with fuzzy CMAC for an overhead crane,” Information Sciences, Vol.181, No.21, pp. 4895-4907, 2011.
- [9] H. Ouyang, N. Uchiyama, and S. Sano, “S-curve trajectory generation for residual load sway suppression in a rotary crane system using only horizontal boom motion,” J. of System Design and Dynamics, Vol.5, No.7, pp. 1418-1432, 2011.
- [10] H. Ouyang, N. Uchiyama, and S. Sano, “Analysis and experiment of residual load sway suppression in rotary crane systems using simple trajectory for horizontal boom motion,” J. of System Design and Dynamics, Vol.6, No.4, pp. 401-416, 2012.
- [11] Z. Masoud, K. Alhazza, E. Abu-Nada, and M. Majeed, “A hybrid command-shaper for double-pendulum overhead cranes,” J. of Vibration and Control, Vol.20, No.1, pp. 24-37, 2012.
- [12] J. Smoczek and J. Szpytko, “Evolutionary algorithm-based design of a fuzzy TBF predictive model and TSK fuzzy anti-sway crane control system,” Engineering Applications of Artificial Intelligence, Vol.28, pp. 190-200, 2014.
- [13] J. Smoczek, “Fuzzy crane control with sensorless payload deflection feedback for vibration reduction,” Mechanical Systems and Signal Processing, Vol.46, No.1, pp. 70-81, 2014.
- [14] T. Y. T. Kuo and S. C. J. Kang, “Control of fast crane operation,” Automation in Construction, Vol.42, pp. 25-35, 2014.
- [15] K. A. Alghanim, K. A. Alhazza, and Z. N. Masoud, “Discrete-time command profile for simultaneous travel and hoist maneuvers of overhead cranes,” J. of Sound and Vibration, Vol.345, pp. 47-57, 2015.
- [16] A. Abe, “Trajectory planning for flexible Cartesian robot manipulator by using artificial neural network: numerical simulation and experimental verification,” Robotica, Vol.29, No.5, pp. 797-804, 2011.
- [17] A. Abe, “Residual vibration suppression for robot manipulator attached to a flexible link by using soft computing techniques,” Proc. of The 2011 IEEE Int. Conf. on Robotics and Biomimetics, pp. 2324-2329, 2011.
- [18] A. Abe, “Anti-sway control for overhead cranes using neural networks,” Int. J. of Innovative Computing, Information and Control, Vol.7, No.7(B), pp. 4251-4262, 2011.
- [19] A. Abe and K. Komuro, “Minimum energy trajectory planning for vibration control of a flexible manipulator using a multi-objective optimisation approach,” Int. J. of Mechatronics and Automation, Vol.2, No.4, pp. 286-294, 2012.
- [20] A. Abe, “Minimum energy trajectory planning method for robot manipulator mounted on flexible base,” Proc. of 9th Asian Control Conf., 7 pages, 2013.
- [21] A. Abe and K. Hashimoto, “A novel feedforward control technique for a flexible dual manipulator,” Robotics and Computer-Integrated Manufacturing, Vol.35, pp. 169-177, 2015.
- [22] Y. Narita, “Combinations for the free-vibration behaviors of anisotropic rectangular plates under general edge conditions,” J. of Applied Mechanics, Vol.67, No.3, pp. 568-573, 2000.
- [23] M. Clerc and J. Kennedy, “The particle swarm – explosion, stability, and convergence in a multidimensional complex space,” IEEE Trans. on Evolutionary Computation, Vol.6, No.1, pp. 58-73, 2002.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.