Paper:
Reduction of Quantization Error in Multirate Output Feedback Control
Takao Sato, Hironobu Sakaguchi, Nozomu Araki, and Yasuo Konishi
University of Hyogo
2167 Shosha, Himeji, Hyogo 671-2280, Japan

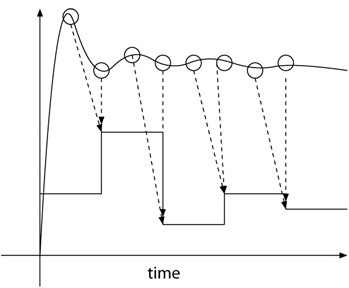
Multirate output feedback control
- [1] K. J. Åström and B. Wittenmark, “Computer-Controlled Systems: Theory & Design,” Prentice Hall, Upper Saddle River, USA, third edition, 1997.
- [2] T. Aoki, Y. Furukawa, and N. Moronuki, “A study on controlling algorithm to realize high-speed & high-accuracy control systems – proposal of modified delta operator –,” J. of Robotics and Mechatronics, Vol.9, No.6, pp. 446-454, 1997.
- [3] B. Bandyopadhyay and S. Janardhanan, “Discrete-time Sliding Mode Control, A Multirate Output Feedback Approach,” Springer, Berlin, Germany, 2006.
- [4] S. Janardhanan and V. Kariwala, “Multirate-output-feedback-based LQ-optimal discrete-time sliding mode control,” IEEE Trans. on Automatic Control, Vol.53, No.1, pp. 367-373, 2008.
- [5] A. Inoue, M. Deng, K. Matsuda, and B. Bandyopadhyay, “Design of a robust sliding mode controller using multirate output feedback,” Proc. of 16th IEEE CCA, pp. 200-203, Singapore, 2007.
- [6] T. Sato and A. Inoue, “Extension of a multirate output feedback control system for improvement in quantization error,” IEEJ Trans. on Electronics, Information and Systems, Vol.131, No.4, pp. 764-772, 2011 (in Japanese).
- [7] T. Mita, S. Hara, and R. Kondo, “Introduction to Digital Control,” Corona publishing, 1988.
- [8] S. Azuma and T. Sugie, “Stability analysis of optimally quantized LFT-feedback systems,” Int. J. of Control, Vol.83, No.6, pp. 1125-1135, 2010.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.